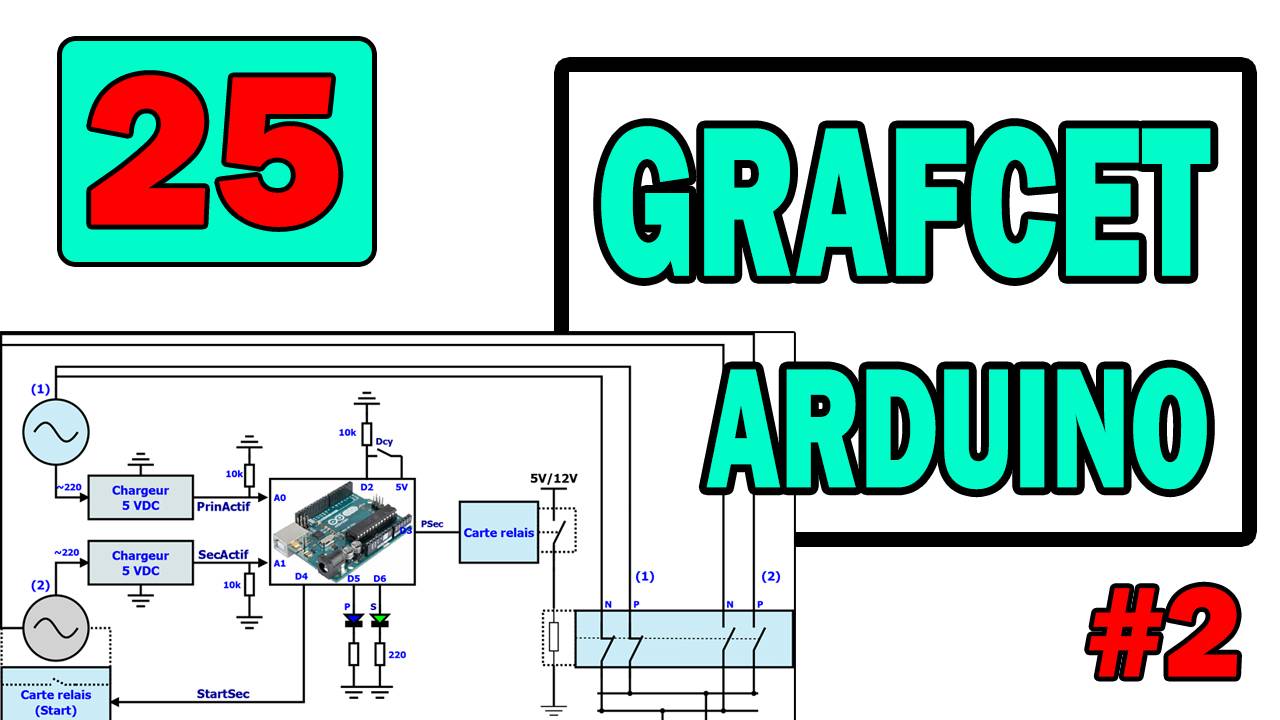
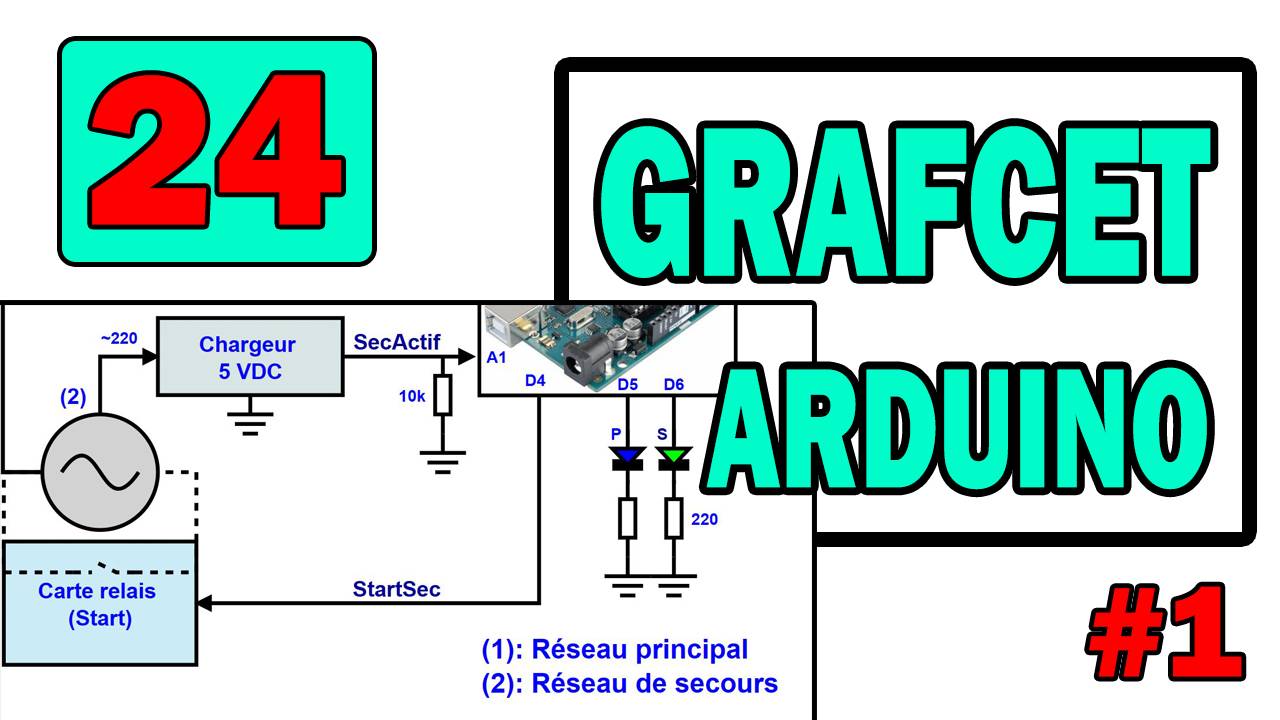
Objectifs Savoir comment ça marche l’inverseur réseau Savoir commander un inverseur réseau avec Arduino Savoir comment détecter la présence d’un réseau Savoir convertir une entrée analogique en entrée digitale Etc. Voir le tuto pour plus de détails. Grafcet des transitions Programme Arduino Un extrait du code est disponible ci-dessous. Vous pouvez consulter le tuto […]