
Objectifs
- Savoir le principe de fonctionnement d’un système de pompage automatique
- Savoir faire le chronogramme des taches d’un système automatique (Grafcet)
- Se familiariser avec l’implémentation d’un GRAFCET
- Savoir comment implémenter un Grafcet avec Arduino
- Savoir comment simuler le fonctionnement d’un système Avec Arduino
- Etc.
Vidéo démonstration
Fonctionnement
Le mini projet est un système automatique de pompage. Il sert à contrôler le remplissage d’un réservoir d’eau (ou fluide) d’une manière automatique en utilisant une pompe électrique. Le montage est constitué des éléments suivants :
Pompe (P) : Elle permet de remplir le réservoir avec de l’eau lorsque le niveau d’eau est faible. La pompe est mise en marche lorsque le niveau d’eau est atteint de niveau bas (B). Elle s’arrête lorsque le niveau d’eau arrive au niveau haut (H).
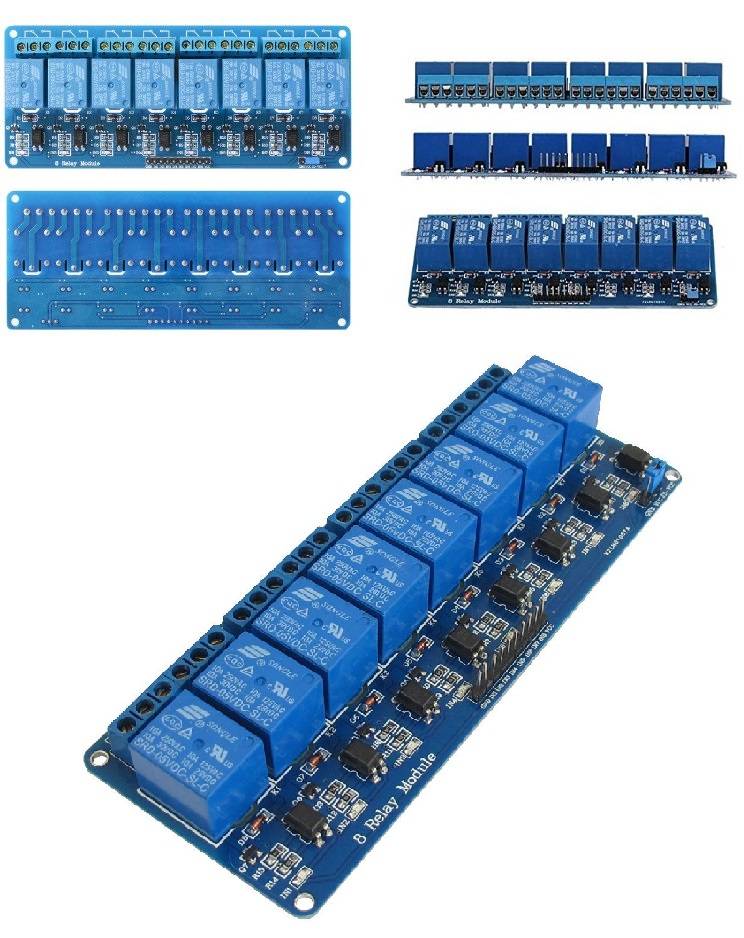
Carte relais : Mise en marche/arrêt de la pompe. La carte relais contient un relais de puissance (AC/DC) qui assure la mise sous tension de la pompe. Les caractéristiques du relais doivent être adéquates avec celle de la pompe (tension, puissance). Nous utiliserons dans ce projet un relais (250V/10A) menu avec un étage de puissance (isolation optique, transistor, diode de retour, etc.). En effet une tension TOR 5V à faible courant permet de déclencher le relais. Le relais ne nécessite pas un transistor de puissance, tout est intègre dans la carte relais !
Détecteurs de niveaux : Le réservoir dispose de deux détecteur TOR de niveaux Haut (H) et Bas (B). Les deux détecteurs fournissent un signal logique de la façon suivante :
- « 0 » : Lorsque le fluide n’attient pas le détecteur, ce dernier fournit un niveau logique bas ou une tension égale à 0V
- « 1 » : Lorsque le fluide attient le détecteur, ce dernier fournit un niveau logique haut ou une tension égale à 5V
LEDs indicatrices : On dispose de trois voyants lumineux (LEDs) indiquent l’état des détecteurs et celui de la pompe :
- LED (P) : Illustre l’état de la pompe. Elle s’allume lorsque la pompe est mise en route
- LED (H) : Illustre l’état du détecteur (H). Elle s’allume lorsque le fluide attient le niveau haut
- LED (B): Illustre l’état du détecteur (B). Elle s’allume lorsque le fluide attient le niveau bas
Carte Arduino : Il sert à contrôler l’ensemble du système (lecture des détecteurs et envoie des consignes aux LEDs et à la pompe)
Comment fabriquer facilement un détecteur du niveau ?
Chronogramme du système
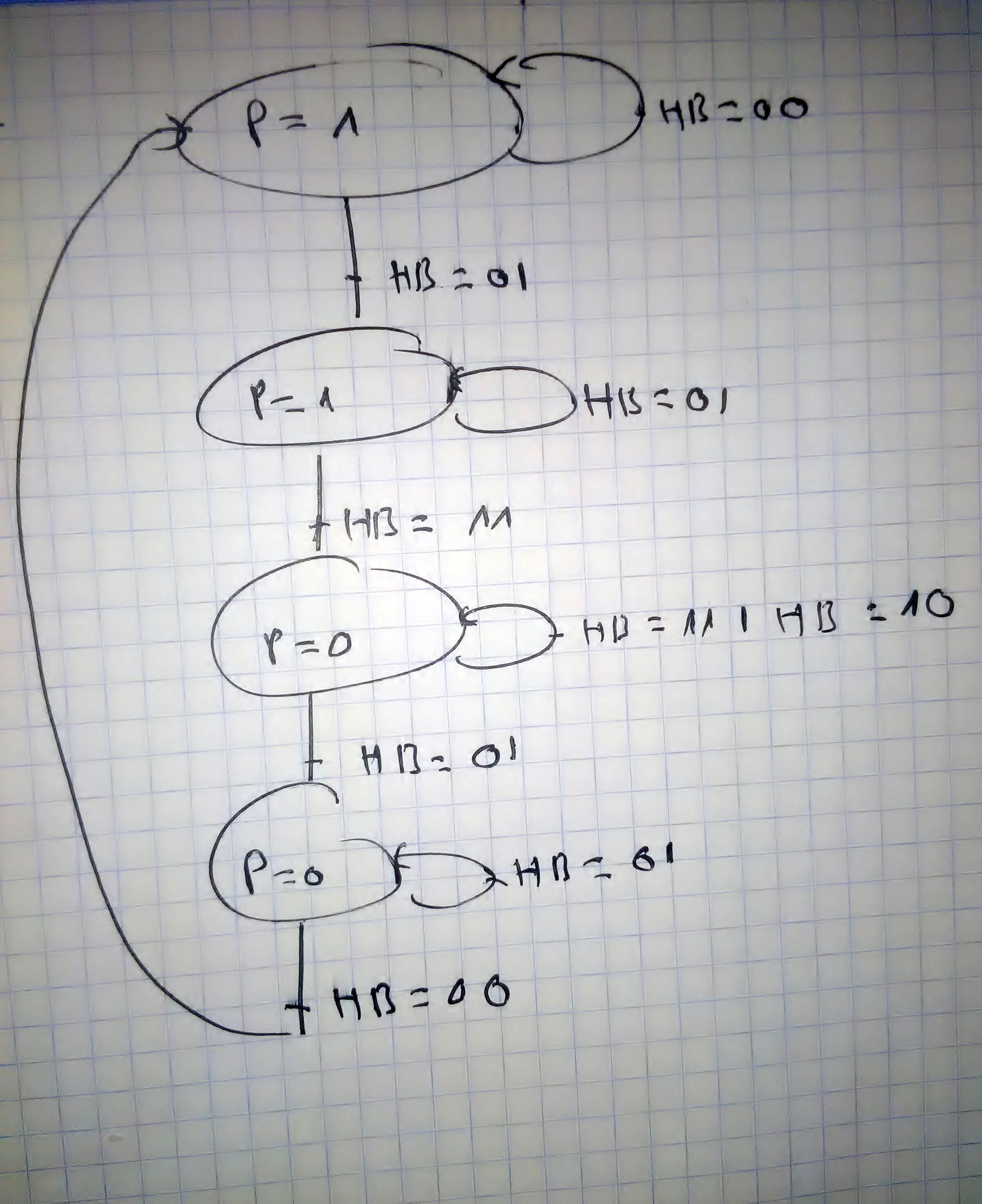
On considère la variable HB sur deux bits : Bit du poids fort H indique l’état du détecteur, B pour celui du bas. Exemples : HB=00 : Les deux détecteurs sont inactifs, HB=01 : Détecteur bas actif, etc. Le programme principal contient 4 états :
Phase de remplissage
- État « 1 » : Il est la position initiale du système. Il faut assurer que le réservoir est vide avant de lancer le programme. En effet, lorsque le réservoir est vide HB=00. Durant cet état, le programme mis en route la pompe (P=1) tant que HB=00. Lorsque HB=01, le programme transit à l’état suivant
- État « 2 » : Le programme mis en route la pompe (P=1) tant que HB=01. Autrement dit, le pompe continue de remplir le réservoir tant le détecteur H n’est pas attient. Une fois HB=11, le programme passe à l’état suivant
Phase de vidange
- État « 3 » : Le programme met en arrêt la pompe tant le réservoir est plient (HB=11) ou défaut du détecteur bas (HB=10). En effet, l’état 10 n’est pas envisageable dans cas pratique car il ‘est pas possible que le fluide atteigne le niveau haut (H=1) sans que le niveau bas soit actif (B=1). Par conséquent, la présence de l’état HB=10 est certainement un défaut du détecteur bas. Le programme transit à l’état suivant le fluide quitte le détecteur haut (HB=01)
- État « 4 » : La pompe reste en état d’arrêt (P=0) tant que le détecteur B est actif (HB=01) (fluide entre H et B). Lorsque le fluide arrive au dessous du détecteur B (HB=00) on relance le cycle de fonctionnent. Ci-dessous le chronogramme du système.
Chronogramme
Câblage des composants
- Détecteur B: Pin 2
- Détecteur H: 3
- LED (B): 5
- LED (H): 6
- LED (P): 9
- Pompe (P): 10
Programme principal
Lecture des détecteurs : GetHB()
La fonction GetHB() permet de lire les états des détecteurs H et B et renvoie une valeur comprise entre 0 et 3. En effet la valeur de retour est notre variable HB !
- HB=0 lorsque H=0 & B=0
- HB=1 lorsque H=0 & B=1
- HB=2 lorsque H=1 & B=0
- HB=3 lorsque H=1 & B=1
Mise en marche de la pompe et son indicateur SetPompe()
La LED (P) reflète l’état de la pompe P en revanche le relais est activé niveau bas. Autrement dit, le relais est actif lorsque la sortie numérique 10 de la carte Arduino est égale à « 0 » (inactif à « 1 »). Par conséquent, les états des sorties 9 et 10 doivent être complémentaires et déclenchés en parallèle. La fonction SetPompe() permet d’activer les deux sorties en respectant l’état de chacune.
Activation des voyants H et B SetLED()
La fonction SetLED() active les LED H et B en fonction de l’état de la variable HB
- HB=0 : Deux LED éteintes
- HB=1 : LED B allumée
- HB=2: LED H allumée
- HB=3 : Deux LED allumées
Comment programmer un état ?
On peut considérer un état comme une boucle infinie. On active une ou plusieurs sorties à l’intérieur de la boucle. La sortie de boucle est assurée par la validation de la transition vers l’état suivant. Dans notre cas, durant l’état « 1 », on active la pompe et son indicateur lorsque HB=0 en boucle. Puis, on passe à l’état « 2 » lorsque HB=1. Ci-dessous la programmation de l’état « 1 » :
Problème de démarrage
Nous constatons que la mise en marche de la pompe durant l’état « 1 » exige l’inactivation des deux détecteurs (HB=0) ou le vidange du réservoir. Il est intéressant d’intégrer le mode vidage (ou nettoyage) du réservoir d’une façon manuelle en utilisant par exemple un interrupteur (« 1 » : Mode normal, « 0 » : Mode manuel). Durant ce mode on désactive la pompe (P=0) puis on affiche les états des LEDs. On met en marche par la suite le système lorsque les deux LED (H et B) sont éteintes.
Programme principal
Téléchargement
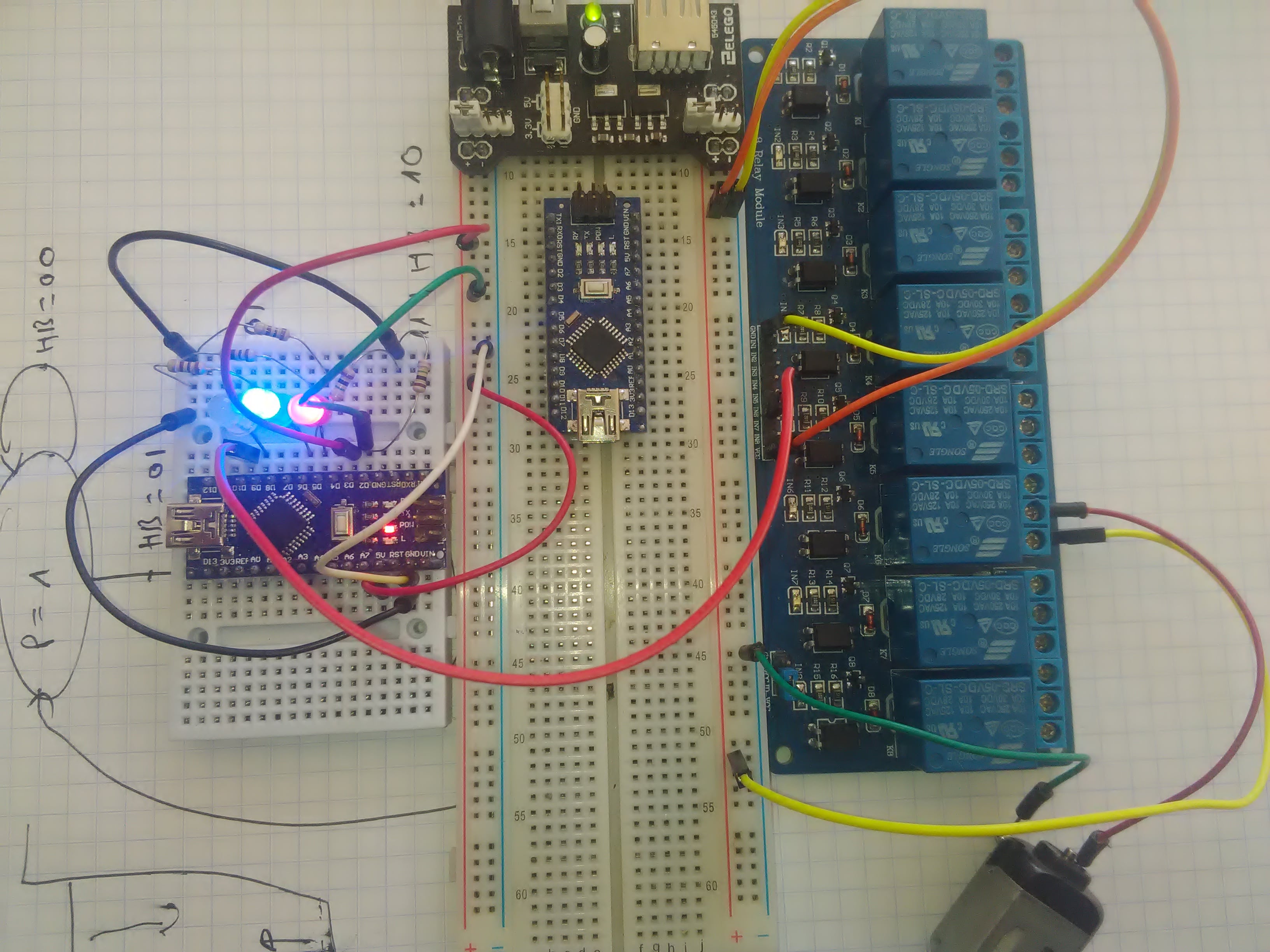
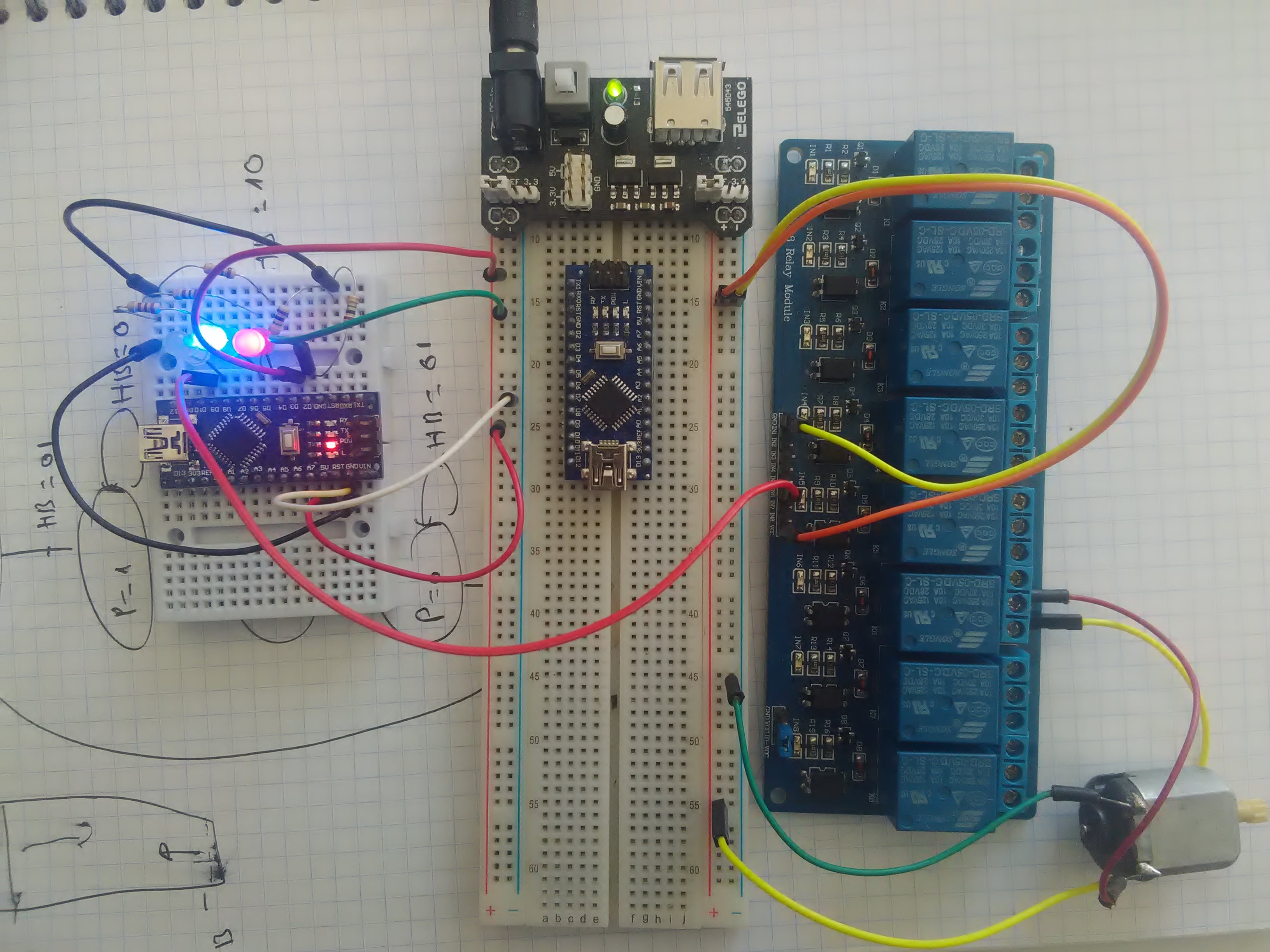
Photos du projet