Beaucoup d’entre vous posent des questions : Comment puis-je interfacer entre Matlab et ISIS ? Comment lire ou écrire dans la carte son de mon ordinateur (microphone ou haute parleur) par Matlab ? Comment afficher les données reçues en temps réel de la carte son ? Comment créer un port COM virtuel ou des liaisons virtuels entre mes outils de développement (Matlab & ISIS) ?
Pas de problème! Ce projet vous offres les outils nécessaires (code MikroC, script Matlab, montage et logiciel gratuit pour ports virtuels) pour que vous puissiez développer vos applications vos même et booster votre esprit de créativité.
A la fin de cet article, vous trouverez un fichier RAR du projet complet à télécharger gratuitement !
N’hésitez pas de poster un commentaire, une critique ou un encouragement de votre part 🙂
En peut résumé le projet en quatre étapes :
- Lecture de la carte son par matlab
- Calcul d’une valeur à partir des échantillons acquis, cette dernière correspond à l’intensité du son
- Transmettre l’intensité du son au microcontrôleur via la liaison UART
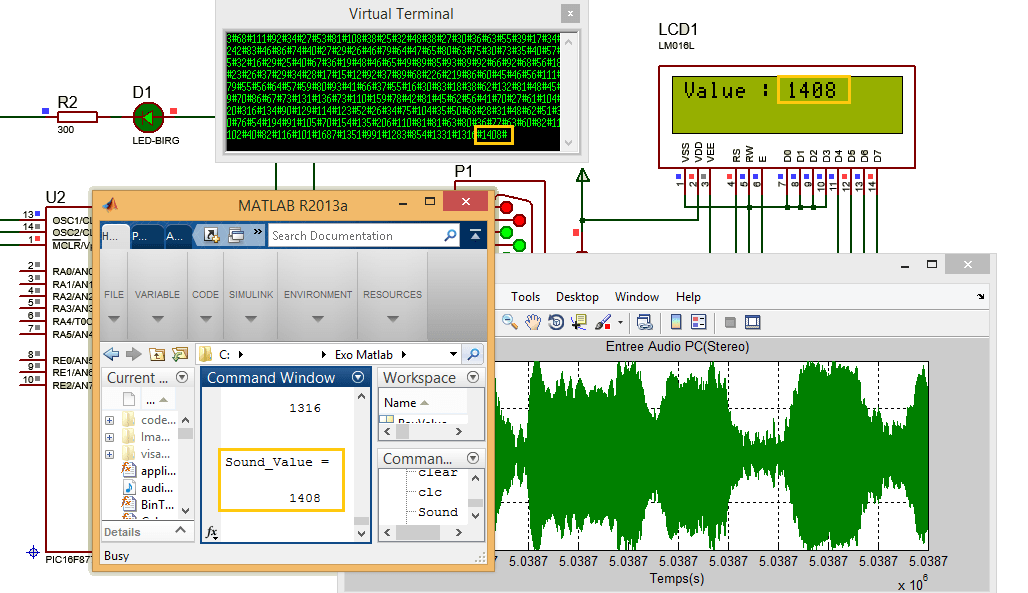
- Réception de la valeur par le microcontrôleur par la liasion UART, afficher la valeur sur LCD et allumer la LED en cas de dépassement de seuil.
Les paramètres de lecture de la carte son sont définit par le script matlab :
- Période de lecture en seconde >>100ms (100ms est le temps nécessaire à matlab pour faire l’acquisition et l’enregistrement des échantillons ), d’ou l’importance de choisi une période largement supérieur à 100ms (T en seconde).
- Fréquence d’échantillonnage Fs (HZ) : Ce paramètre dépend de votre carte son (8000, 11025, 22050, 44100, 48000 ou 96000 Hz)
- Résolution ADC de la carte son de votre ordinateur en bits : 12,16 ou 24 bits (nBits)
- Nombre de canaux audio : 1 ou 2 , 1 pour mono et 2 pour stéréo.
Note : Si vous ne connaissez pas les paramètres de votre carte son ( résolution, fréquence) , vous pouvez choisir les valeurs max et matlab fera le travail à votre place (Fs=96000 et 24 bits de résolution) !
Les paramètres de la liaison série définit par le script matlab :
- Vitesse de transmission : 110 baud, 300 baud, 1 200 baud, 2 400 baud, 4 800 baud, 9 600 baud, 19 200 baud, 38 400 baud, 57 600 baud ou 115 200 baud
- Nombre de bits : 7 ou 8 bits
Note : Vous pouvez apporter des modifications sur la configuration de la liaison série ( vitesse, nombre de bits), mais les paramètres doivent être les mêmes dans le scipt matlab, code mikroc et le circuit d’émulation UART sur ISIS.
Les paramètres principales du projet sur MikroC :
- Seuil de déclenchement : Ce paramètre défini la valeur minimale de l’intensité du sont qui induit l’allumage de la LED. La valeur du seuil dépend de la sensibilité du capteur. Si le seuil est trop faible, le capteur peut détecter des valeurs faibles du son
- Vitesse de réception en baud, doit être la même du celle configurée sur le script matlab.
Comment calculer l’intensité du son ?
Cette mesure correspond à la variance de la tension absolue acquise par la carte son pendant une période T. C’est une mesure classique pour évalue le changement de l’intensité du son. Vous pouvez utilisez d’autres mesures statistiques ou effectuez des post-traitements (débruitage, filtrage numérique,…) sur le son avant de calculer la valeur de l’intensité.
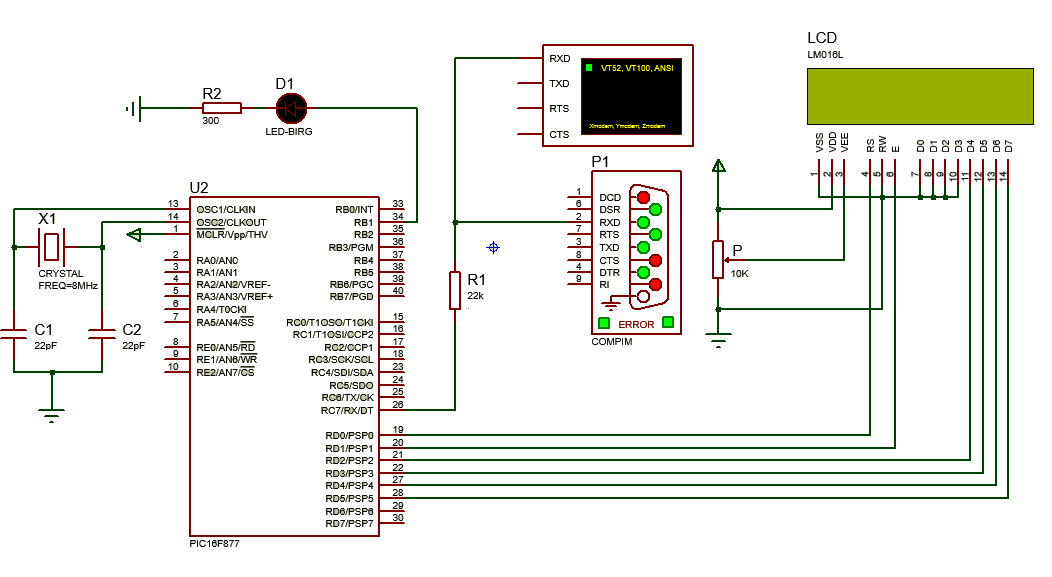
Schéma électronique du projet
Mode de fonctionnement :
- Télécharger le fichier RAR du projet (en bas de l’article)
- Installer le logiciel de création des ports COM virtuel
- Allez dans périphérique==> Créer puis sélectionnez un périphérique de type « pair » et suivez les instructions
- Click sur Démarrer l’émulation
- Exécuter le script matlab
- Lancer le fichier ISIS et click sur lancer la simulation
Important :
- Si vous arrêtez la simulation sur ISIS vous devez relancer le fichier ISIS pour que la liaison UART sera prise en considération par l’émulateur
- Le script matlab tourne en boucle ferme, pour arrêter la simulation vous tapez sur l’espace workspace du matlab » Ctrl+C » puis vous exécutez le code en bas du script pour fermer le port série.
- Vous pouvez ajuster les paramètres de votre carte son pour activer le microphone ou tout simplement lire le son de votre ordinateur (musique, vidéos, …).
Code MicroC du projet :
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%% Capteur de son logiciel %%%%
%%%% Microphone PC & PIC 16F sous ISIS & Matlab %%%%
%%%% 06/04/2015 %%%%
%%%% https://www.electronique-mixte.fr %%%%
%%%% https://www.facebook.com/ElectroniqueMixte %%%%
%%%% %%%%
%%%% %%%%
%%%% Possibilités du projet %%%%
%%%% - Oscilloscope numérique (Fs=96KHz, 16 bits )%%%%
%%%% - Capteur de son ultra sensible Gratuit ! %%%%
%%%% - Surveillance temps réel %%%%
%%%% - Reconnaissance de la parole %%%%
%%%% - Acquisition et traitement du signal %%%%
%%%% - ... %%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
*/
// Fonction conversion d'un char en int(0-9 ou -1)
int CharToInt(unsigned char c)
{
int n ;
switch (c)
{
case '0':
n=0;
break;
case '1':
n=1;
break;
case '2':
n=2;
break;
case '3':
n=3;
break;
case '4':
n=4;
break;
case '5':
n=5;
break;
case '6':
n=6;
break;
case '7':
n=7;
break;
case '8':
n=8;
break;
case '9':
n=9;
break;
default :
n=-1;
}
return n;
}
// Fonction calcul de x^y entière
int powint(int base, int expon)
{
int val =1;
int i ;
if (expon==0) val = 1;
else
{
for(i=0;i<expon;i++)
val=val*base;
}
return val;
}
// Connexions LCD
sbit LCD_RS at RD0_bit;
sbit LCD_EN at RD1_bit;
sbit LCD_D4 at RD2_bit;
sbit LCD_D5 at RD3_bit;
sbit LCD_D6 at RD4_bit;
sbit LCD_D7 at RD5_bit;
sbit LCD_RS_Direction at TRISD0_bit;
sbit LCD_EN_Direction at TRISD1_bit;
sbit LCD_D4_Direction at TRISD2_bit;
sbit LCD_D5_Direction at TRISD3_bit;
sbit LCD_D6_Direction at TRISD4_bit;
sbit LCD_D7_Direction at TRISD5_bit;
const int UARRT1_Baud =2400; //Vitesse UART1
const int Taille = 12;
unsigned char SoundStr[Taille];
unsigned char SoundStrTmp[Taille];
unsigned char LCD_Clear[]=" "; // Text pour Effacer LCD
int Value=0;
const int Seuil=100; // Seuil de déclenchement
int SoundInt=0;
int i,j=0;
void main()
{
// Déclaration des fonctions
int CharToInt(unsigned char );
int powint(int , int );
// Initialisation des périphériques
Lcd_Init();
Lcd_Cmd(_LCD_CLEAR);
Lcd_Cmd(_LCD_CURSOR_OFF);
UART1_Init(UARRT1_Baud);
delay_ms(100);
ADCON1 = 0x07; // PORTS en mode digital
TRISA = 0xFF; // PORTA en entrée
TRISC = 0xFF; // PORTC en entée
TRISB = 0x00; // PORTB en sortie
TRISD = 0x00; // PORTD en sortie
PORTB = 0x00;
do
{
if (UART1_Data_Ready() == 1)
{
UART1_Read_Text(SoundStr, "#", Taille); // Lire le text jusqu'à trouvé le text "#"
Lcd_Out(1,8,LCD_Clear); // Effacer LCD
Lcd_Out(1,8,SoundStr); // Afficher le text sur LCD
Lcd_Out(1,1,"Value :");
/*Extraction de la valeur reçue (conversion String to int)
Format de SoundStr (taille 12):
1- .C1.......... C1=('0'-'9') (.)='\0' Exp: SoundStr=" 1 "
2- .C1C2....... Exp: SoundStr=" 12 ";
3- .C1C2C3....... Exp: SoundStr=" 123 ";
4- .C1C2C3C4C5C6C7.... Exp: SoundStr=" 1234567 ";
Eexemple : si SoundStr=" 478 " Après calcul SoundInt=478!! */
SoundInt=0;
j=0;
for(i=Taille;i>0;i--)
{
Value=CharToInt(SoundStr[i]);
if(Value<10 && Value>=0)
{
SoundInt = SoundInt +(CharToInt(SoundStr[i])*powint(10,j));
j++;
}
}
//Alimenter La LED si l'in dépasse le Seuil
if( SoundInt> Seuil) PORTB = 0x02;
else PORTB = 0x00;
delay_ms(300);
}
} while(1);
}
Code Matlab :
clear all ;
close all ;
clc ;
% Paramètres du capteur du son (mécrophone)
Fs=48000; % 8000, 11025, 22050, 44100, 48000 ou 96000 Hz.
Ts=1/Fs;
nBits=16; % Résolution ADC carte son (12,16 ou 24 bits)
nChannels=2; % Nobmre de cnnaus 1 (mono) 2 (stereo)
T=1; % Période d'acquisition
i=0;
t=0:Ts:T-Ts; % Vecteur temps pour l'affichage temporelle
% Création d'un objet Audio
recObj = audiorecorder(Fs,nBits,nChannels);
% Paramètres de la liaison série (COM)
delete(instrfind);
pause(0.1);
BauValue=2400; % Vitesse
NumBits=8; % Nomble de bits
% Création d'un objet Serial Port
s = serial('COM1','BaudRate',BauValue,'DataBits', NumBits, 'Parity', 'none');
% Connexion du port
fopen(s);
while(1)
% Début d'enregistrement
recordblocking(recObj, T);
% Stockage de l'audio dans la variable Y
Y = getaudiodata(recObj);
% Moyenne de la valeur abs des deux canaux(son capté)
Y_abs=abs(Y);
Y0 = (Y_abs(:,1) + Y_abs(:,2))/2;
% Calcul de l'intensité du son (variance)
Y_var=sqrt(var(Y0));
Sound_Value=round(Y_var*5e3)
% Conversion de la valeur flottante en chaîne de caractère
StrValue =int2str(Sound_Value);
% Transfert de la valeur
fprintf(s,StrValue);
% Transfert du caratère (fin de transmission)
fprintf(s,'#');
% Affichage du signal acquis
% La base de temps
Tmin = 1e-3;
Tmax = 10e-3;
% Tension
Vmin = -1e-4;
Vmax =1e-1;
% Affichage temporelle
plot(t,Y);
grid on;
xlabel('Temps(s)');
ylabel('Tension(V)');
title('Entree Audio PC(Stereo)');
% xlim([Tmin+i*T Tmax+i*T]);
% ylim([Vmin Vmax]);
% Mise à jour de la période T
i=i+T;
t=t+i;
% wavwrite(Y,Fs,'audio.wav'); % Enregistrement sous format vav
end
% Destruction de l'objet (Port série)
% Note :
% - Clrl+C : Arreter le programme
% - Executer le code si-dessus dans l'espace workspace
% pour détruire l'objet Serial
fclose(instrfind);
delete(s);
clear s;Télécharger gratuitement le fichier du projet : Capteur de son logiciel à base du PIC16F877 + Matlab + ISIS + MikroC (Schéma ISIS + Code MikroC + Code matlab + Logiciel gratuit ) :
5 réponses sur « Projet électronique : Capteur de son logiciel à base du PIC16F877 + Matlab + ISIS + MikroC »
c’est vraiment intéressent! Merci infiniment pour le grand travail que vous avez fourni
[…] Vous pouvez télécharger le programme dans le projet Capteur de son logiciel à base du PIC16F877. […]
merci comment créer le virtuel port
merci
c’est vraiment intéressent! Merci infiniment pour le grand travail que vous avez fourni.