Titre: Robot hexapode
Auteurs: Julien CHEVRIER
Ecole : Université de Tohoku, Japon
Pages : 50
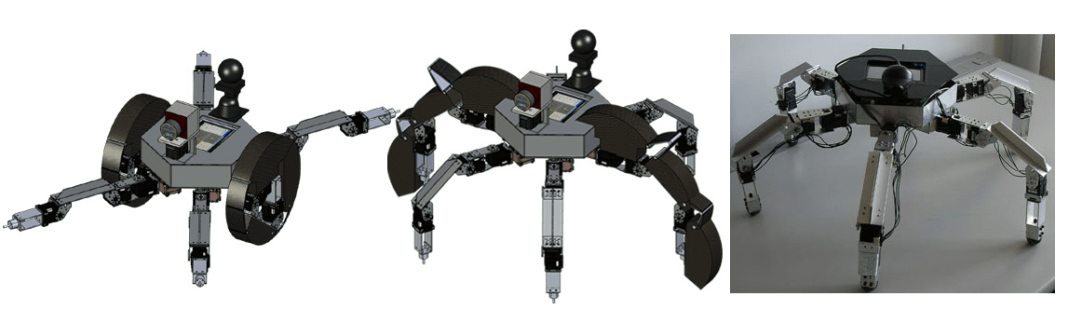

Résumé : Le stage a été effectué sur un robot hexapode hybride nommé LEON, acronyme de Lunar Exploration OmnidirectionalNetbot (Fig. 1). Ce robot est la réalisation et le sujet de recherche du Docteur E. Rohmer. Ce robot hybride est composé de six pattes à trois degrés de liberté dont deux pouvant se replier sur elles-mêmes pour former des roues.
PFE-Rapport de projet de fin d’étude (9)Téléchargement du fichier PDF du rapport PFE : Robot hexapode