Objectifs
- Savoir l’importance du filtre
- Savoir tracer la fonction du transfert (FT) (Gain & Phase) d’un filtre quelconque
- Savoir si un filtre est stable ou non (étude de l’instabilité d’un filtre quelconque)
- Exemple du filtrage d’un signal ECG bruité
- Limitations du filtre
- Etc.
Voir la vidéo pour plus des détails
Programme Matlab
clear all; close all; clc;
%% Traitement du signal | Matlab #3: Synthèse du filtre Butterworth
%% Cours & Projets: www.Electronique-Mixte.fr
% 1. Savoir l'importance du filtre
% 2. Savoir tracer la fonction du transfert (FT) (Gain & Phase)
% d'un filtre quelconque
% 3. Exemple du filtrage d'un signal ECG bruité
% 4. Limitations du filtre
% 5. Etc.
%% Paramètres du signal ECG
T=1; %% Période normalisée Toujours=1!!!!!!!!!!!!
n=500;
ecg_dc=0.14;
p_wave =[0.1 0.1*T 0.4*T]; % 3
% a_pwav=p_wave(1); % Amplitude
% d_pwav=p_wave(2); % Duration
% t_pwav=p_wave(3); % p-r interval
q_wave =[0.2 0.1*T ]; % -
qrs_wave =[1 0.1*T];
s_wave =[0.3 0.2*T ]; % -
t_wave =[0.2 0.2*T 0.2*T]; % 3
u_wave =[0.1 0.1*T];
% Génération du signal
ECG_s = ecg(n, p_wave, q_wave, qrs_wave, s_wave, t_wave, u_wave);
ECG_s=ECG_s-ecg_dc; % Suppression de la composante DC
%% Périodisation d'un signal
% Génération d'une distribution peine de Dirac
f0=1; t0=1/f0; n0=10; N=n0*n;
t=linspace(0,n0*t0/2,N);
A=1; s_n=A*sin(2*pi*f0*t);
s_b=sign(s_n);
s_diff=abs(conv(s_b,[-1 1], 'same'));
s_diff=s_diff/2;
% bords
s_diff(1)=0;
s_diff(end)=0;
%% Périodisation
ecg_p=conv(s_diff,ECG_s, 'same');
ecg_p=ecg_p+ecg_dc;
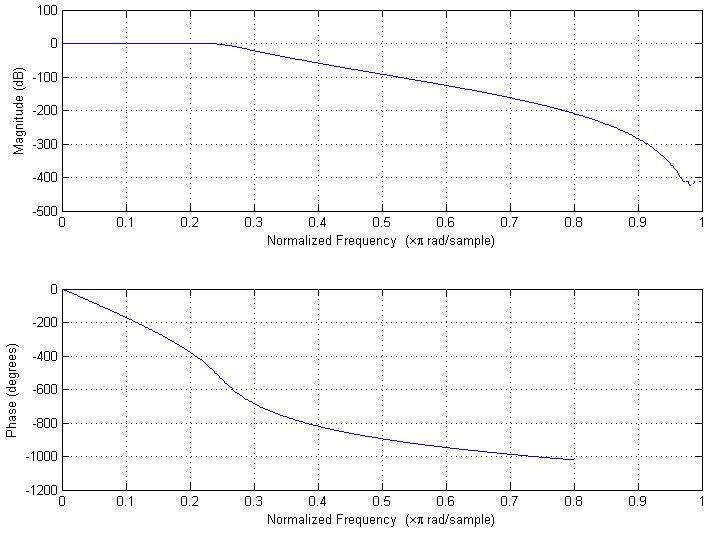
%% Filtrage de Butterworth
% Params du filtre
ts=t(2)-t(1); fs=1/ts; % Fréquence Fs
fc=(fs/2)/4; % Fréquence de coupure
fn=fc/(fs/2); % Fréquence normalisée (ou pulsation)
n_fil=12; % Ordre du filtre
% Génération des coefs
[b, a]=butter(n_fil,fn, 'low'); % 'high', 'stop', 'low', 'bandpass'
% Affichage de la FT du filtre
figure(1); freqz(b,a); % Ou bien fvtool(b,a);
%% Ajout du bruit
% Bruit
sig=0.5e-1;
b_n=sig*randn(1,N);
% Ajout du bruit
s_b_n=b_n+ecg_p;
% Filtrage
s_fil=filter(b,a,s_b_n);
%% Affichage
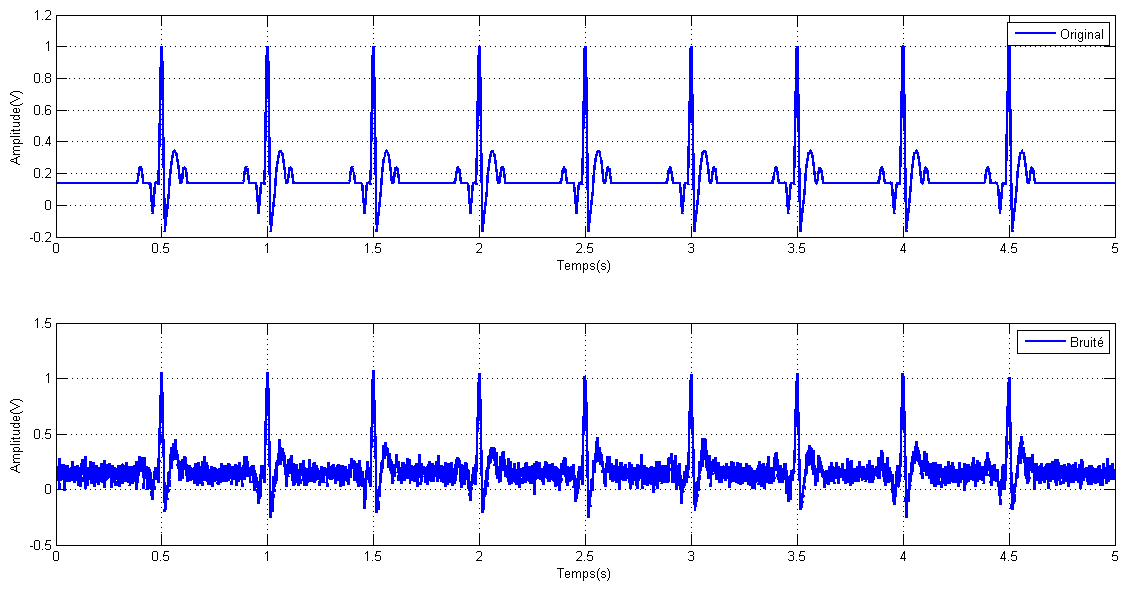
figure(2)
subplot(211); plot(t, ecg_p, 'linewidth',2); grid on;
xlabel('Temps(s)'); ylabel('Amplitude(V)'); legend('Original');
xlim([t(1) t(end)]);
subplot(212); plot(t, s_b_n, 'linewidth',2); grid on;
xlabel('Temps(s)'); ylabel('Amplitude(V)'); legend('Bruité');
xlim([t(1) t(end)]);
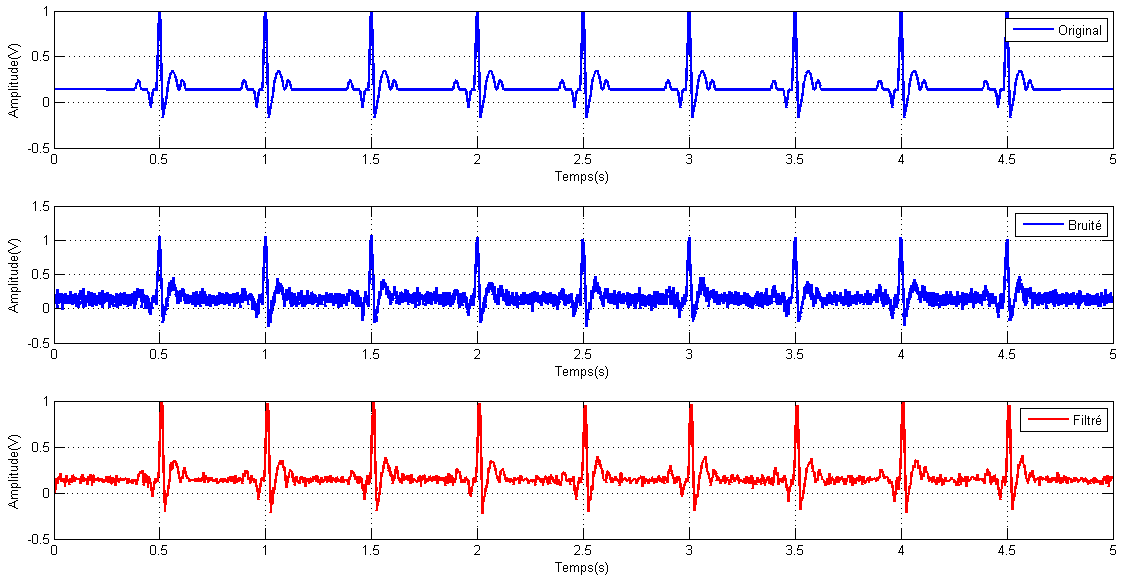
figure(3)
subplot(311); plot(t, ecg_p, 'linewidth',2); grid on;
xlabel('Temps(s)'); ylabel('Amplitude(V)'); legend('Original');
xlim([t(1) t(end)]);
subplot(312); plot(t, s_b_n, 'linewidth',2); grid on; hold on;
xlabel('Temps(s)'); ylabel('Amplitude(V)'); legend('Bruité');
xlim([t(1) t(end)]);
subplot(313); plot(t, s_fil, 'r', 'linewidth',2); grid on; hold off;
xlabel('Temps(s)'); ylabel('Amplitude(V)'); legend('Filtré');
xlim([t(1) t(end)]); %title(num2str(i));