
Objectifs
- Comprendre la notion des interruptions
- Différence entre pooling et interruption
- Connaitre et apprendre à configurer les registres d’interruptions
- Savoir programmer son routine d’interruption
- Savoir la procédures d’utilisation d’une interruption externe
Définition
Une interruption comme définition est un événement qui permet d’interrompre le programme principal (la fonction loop() ) pour exécuter la fonction (ou routine) d’interruption. Lorsqu’une interruption est désactiver (ou masquer), la fonction loop() qui sera exécuter par défaut d’une façon infinie. Dans le cas échéant, la routine d’interruption se déclenche dès l’apparition d’un évènement.
Notion du pooling (sans interrurption) – Exemple
La technique de pooling consiste à l’utilisation normale de la boucle loop() sans faire appel aux interruptions. On scrute les entrées d’une façon itérative puis on déclenche les sorties (actions) en fonctions des entrées. Le temps de mise à jour des sorties dépend étroitement du moment de l’apparition de l’évènement (exemples: surintensité dans un moteur détecté par un capteur, défaut dans un détecteur, emballement de la température d’une batterie, robot à proximité du mure, fin de course, etc.) et l’emplacement de l’instruction en cours dans le programme. Dans ce cas, il faut agir immédiatement. Une latence peut entrainer des conséquences graves. Si par exemple l’évènement est apparu au début du programme, mais le traitement du défaut se trouve à la fin de la boucle loop dans un programme constitué de 200 lignes d’une durée totale d’une seconde (le temps d’exécution de la fonction loop()). Dans ces conditions, la gestion de l’évènement ne sera effectuée qu’après une secondes !
Notion de l’interruption – Exemple
Interrompe la boucle loop() et exécution immédiate à l’ordre du microseconde de la routine d’interruption.
Qu’est-ce qu’un évènement ?
Un événement peut être un signal électrique Tout Ou Rien (TOR) issu d’un détecteur qui se trouve à l’extérieur de la carte Arduino dites évènement matériel. Il peut être aussi logiciel générer un périphérique propre à la carte Arduino (Microcontrôleur). Un événement matériel peut être déclenché par :
- Un front montant (passage du 0 à 1 d’un pin digital) ou bien un front descendant (passage du 1 à 0 d’un pin digital). Dans ce cas, la routine d’interruption par transition du signal électrique entrant. Autrement dit, une seule exécution par cycle. Lorsqu’on utilise un bouton poussoir, le programme s’exécute d’interruption se déclenche une seule fois dès qu’on appuie sur le bouton (transition 0=>1 ou 1=>0). Il faut relâcher le bouton et appuie de nouveau pour recommencer le cycle.
- Niveau logique 1 (pin à 5V par exemple) ou niveau logique 0 (pin à la masse). Dans ce cas, la routine d’interruption s’exécute en boucle tant que le pin est à 1 ou à 0 contrairement à l’utilisation des fronts.
Un évènement logiciel un signal généré par un périphérique propre au microcontrôleur (Exemple : débordement d’un TIMER (Overflow), réception par liaison UART, liaison I2C, fin de conversion du convertisseur A/N, etc.). En résumé, 99% des périphériques du µC dispose d’une ou plusieurs interruptions. La carte Arduino Mego dispose de 57 sources d’interruptions (voir la page 101-102 du datasheet).
- Datasheet Arduino Mega (Microcontrôleur ATmega2560)
- Datasheet Arduino Uno (Microcontrôleur ATmega328)
Les sources d’interruptions de la carte Arduino Mega (57)
Vecteur1 |
SourceRESET |
DéfinitionExternal Pin, Power-on Reset, etc. |
Procédure d’utilisation d’une interruption
Dans cet exemple on se focalise sur l’interruption externe INT0. La démarche est identique pour les autres types interruptions.
1. Définit le type de l’interruption
- Pin externe : INT0
- Périphériques (TIMERS, ADC, UART, etc.)
2. Chercher le pin correspond à l’interruption en fonction du type de la carte Arduino
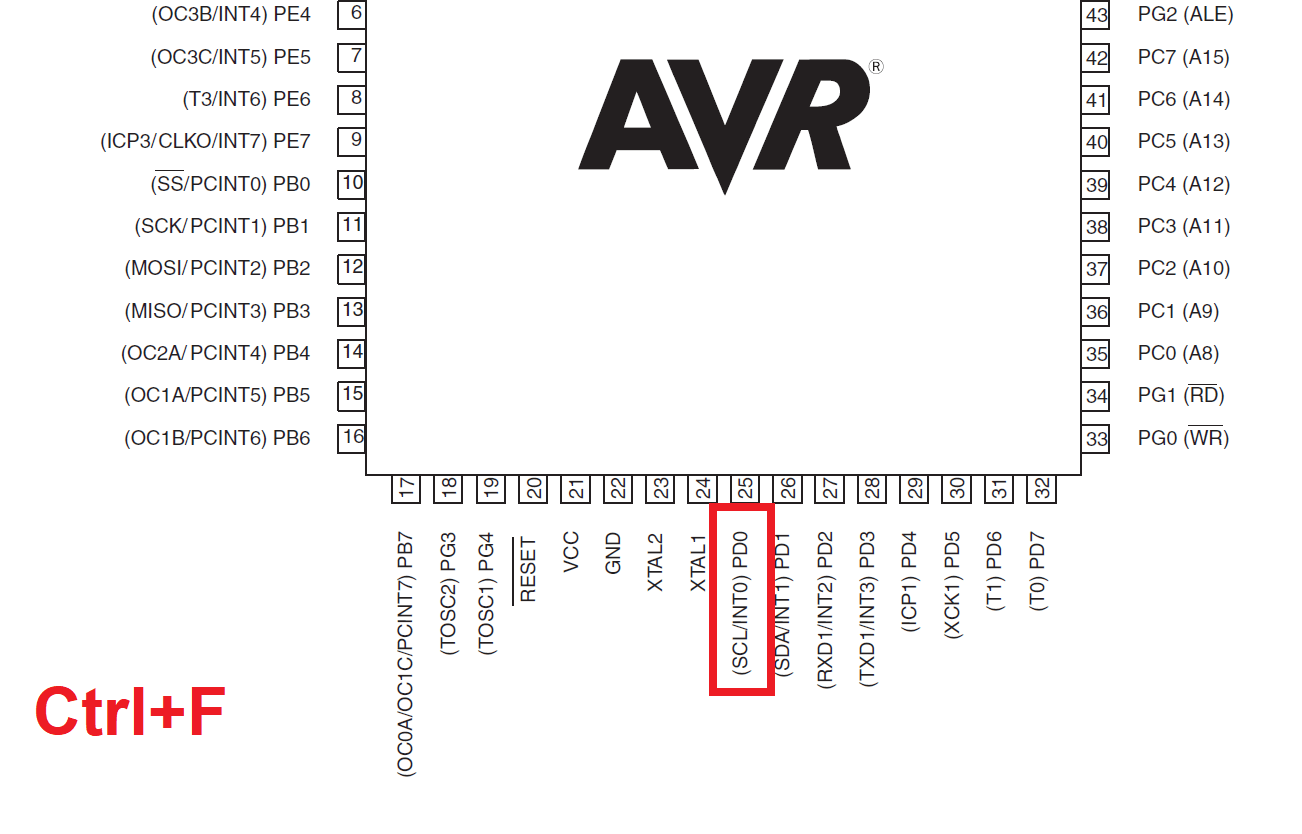
Faire correspondre l’interruption INT0, INT1, etc. avec le pin physique est une étape importante. L’emplacement du pin dépendre du type du microcontrôleur. Il faut se référencer au datasheet pour ne pas se tromper de l’emplacement du pin. Ici, on va utiliser l’interruption INT0 en utilisant la carte Arduino Mega. Ci-dessous l’extrait de l’emplacement du pin. Utiliser « Ctrl+F » avec le mot clé « INT0 » pour retrouver des informations relatives à l’interruptions INT0 dans le datasheet.
3. Câbler votre montage et configurer le pin dédié en entrée
Configure le pin dédié en entrée en utilisant la fonction pinMode() ou bien le registre DDRx en positionnant le bit concerné à « 0 » : Exemple DDRD=0x00 (8 bits du port D en entrée). Ci-dessous la mapping des pins de la carte Arduino Mega2560:
Pin Arduino0 8 14 22 30 38 46 |
Port MappingPORTE 0 PORTH 5 PORTJ 1 PORTA 0 PORTB 7 PORTD 7 PORTL 3 |
Mapping pour ATmega8 et ATmega168
- B (digital pin 8 to 13)
- C (analog input pins)
- D (digital pins 0 to 7)
4. Activation de l’interruption globale (SREG)
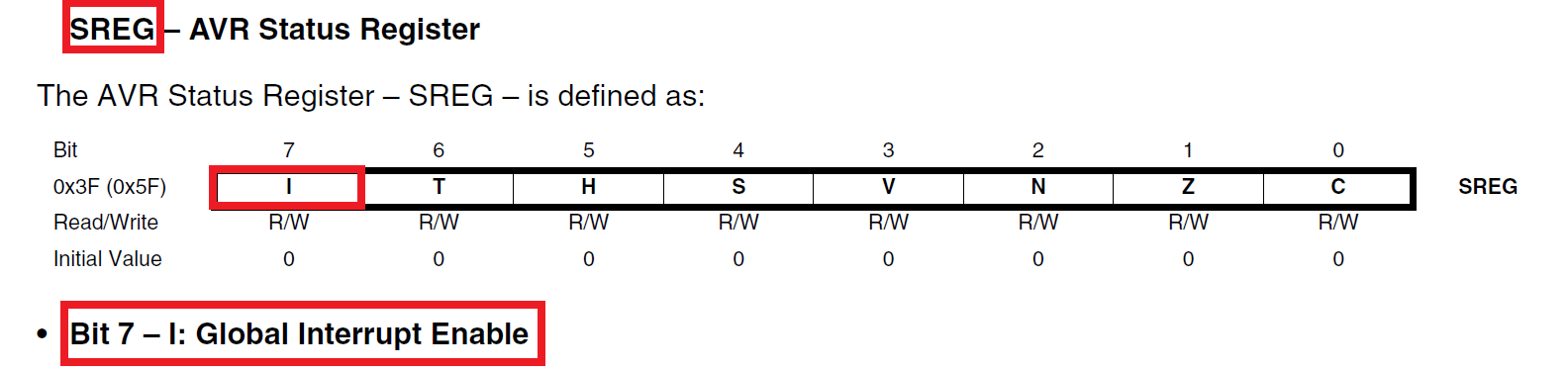
SREG: AVR Status Register – Activer/Désactiver l’interruption globale
Bit 7 – I: Global Interrupt Enable (0x80
- SREG|=0x80 // Activation (Positionner le bit 7 à « 1 »)
- SREG&=0x7f // Désactivation (Forcer le bit 7 à « 0 »)
Ou bien
- sei(): Set interrupt – Activation
- cli(): clear interrup – Désactivation (masquer)
5. Validation de l’interruption (EIMSK )
La validation d’une interruption spécifique est opérée dans le registre EIMSK et positionner le bit concerne à ‘1’. Le nombre des interruptions va dépendre du type de la carte (nano, mini, mega, etc.). Consulter le datasheet pour être sure des interruptions disponibles. Dans le cas de la carte arduino Mega, il dispose de 8 interruptions INT0-INT7, deux pour Arduino uno (INT0 et IN1) seulement!
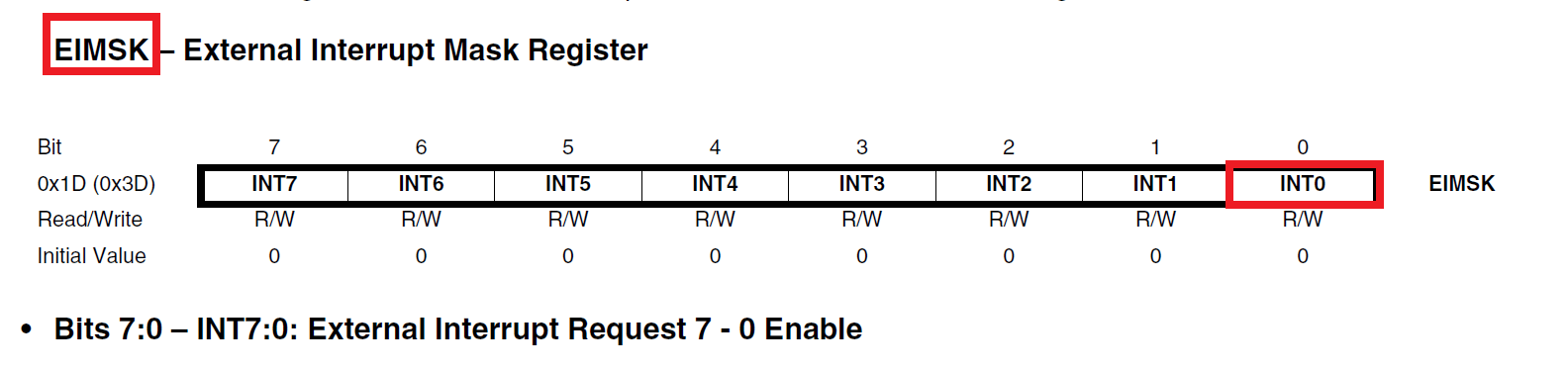
EIMSK – External Interrupt Mask Register
Bit 7 6 5 4 3 2 1 0
0x1D INT7 INT6 INT5 INT4 INT3 INT2 INT1 INT0
- EIMSK|=0x01; // Validation de l’interruption INT0
- Ou bien EIMSK =0x01; (non recommandée)
6. Choix du mode de la détection de l’évènement
D’une autre façon, comment la routine d’interruption sera réveillée lorsqu’un évènement se présent dans le pin dédié (par front ou niveau logique). Les registres EICRA/ EICRB permettent de configurer le mode de déclanchement des interruptions INT0, INT1,…, INT7. Chaque registre permet de configurer 4 interruptions EICRA (INT0-INT3), EICRB (INT4, INT4).
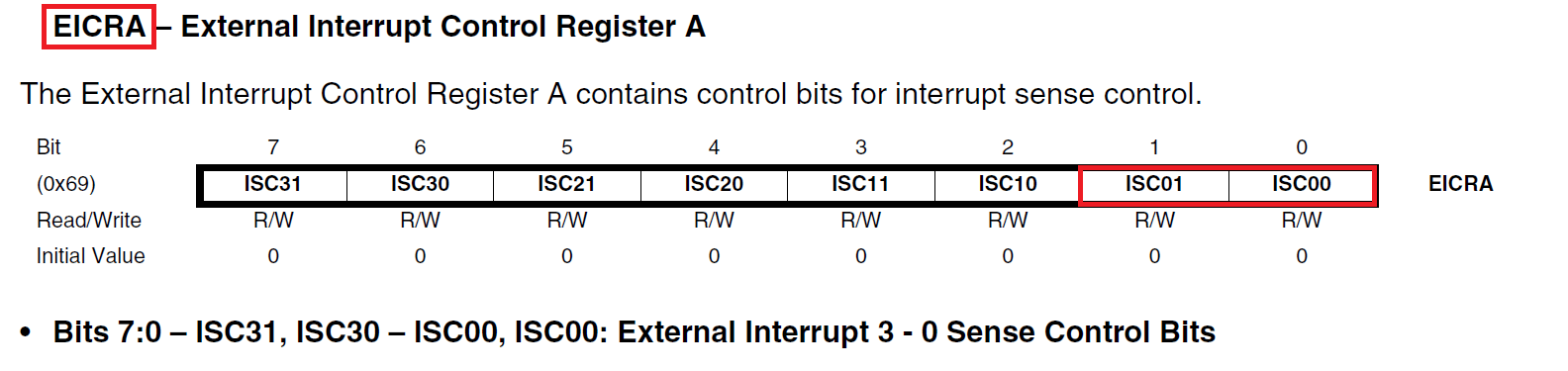
EICRA/EICRB
Bit 7 6 5 4 3 2 1 0
ISC31 ISC30 ISC21 ISC20 ISC11 ISC10 ISC01 ISC00
- ISCn1 ISCn0
- 0 0 niveau bas ‘0’ dans INTn
- 0 1 front montant & descedan dans INTn (changement d’états: passage du 0 à 1 ou bien 1 à 0)
- 1 0 Front descendant dans INTn
- 1 1 Front montant dans INTn
Dans notre exemple, on utilise l’interruption INT0 alors les bits ISC01 et ISC00 qui sont concernés. Dans le cas de déclanchement par front montant, il faut positionner les deux bits à ‘1’. Autrement dit il faut charger le registre EICRA avec 0x03 de la façon suivante: EICRA=0x03 ou bien EICRA|=0x03;
7. Enfin, il faut programmer la fonction (routine) de l’interruption
Interrupt sub-routine (ISR) est la fonction par défaut utiliser pour programmes les interruptions. Elle ne prend aucun argument en entrée et elle ne retourne aucun résultat. En revanche, il faut bien préciser le vecteur d’interruption. Chaque interruption dispose d’un vecteur qui lui propre. La carte Arduino Mega dispose de 57 interruptions, chaque interruption est caractérisée par son vecteur et adresse. Consultez le datasheet du microcontrôleur pour connaitre les vecteurs (voir la page 101 pour la carte Arduino Mega). Vous pouvez dupliquer la fonction autant de fois, il faut juste préciser le vecteur pour différencier entre les routines. Ci-dessous et un exemple d’utilisation de la fonction ISR().