Comprendre l’utilité d’un capteur gyroscopique /accéléromètre
Savoir utiliser le capteur GY-521 avec Arduino
Savoir la différence entre un accéléromètre et un gyroscope
Savoir les caractéristiques du gyroscope et de l’accéléromètre
Visualiser l’évolution temporelle des signaux des deux capteurs
Et plus encore.
Fonctionnement
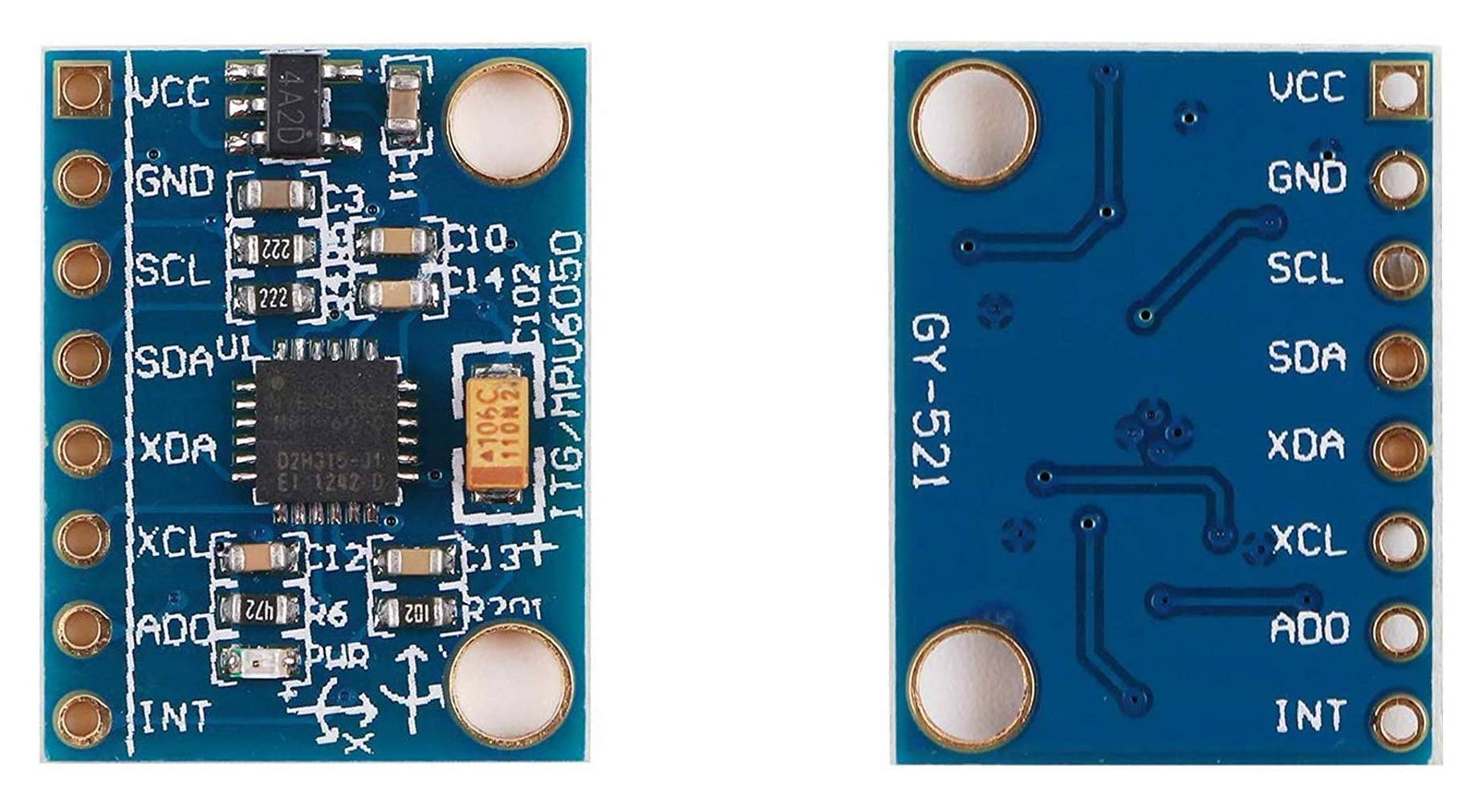
La carte GY-521 est muni d’un capteur MEMS MPU-6050. Le circuit contient trois capteurs: Un accéléromètre à trois composantes (3 axes), un gyroscope à 3C et un capteur de température.
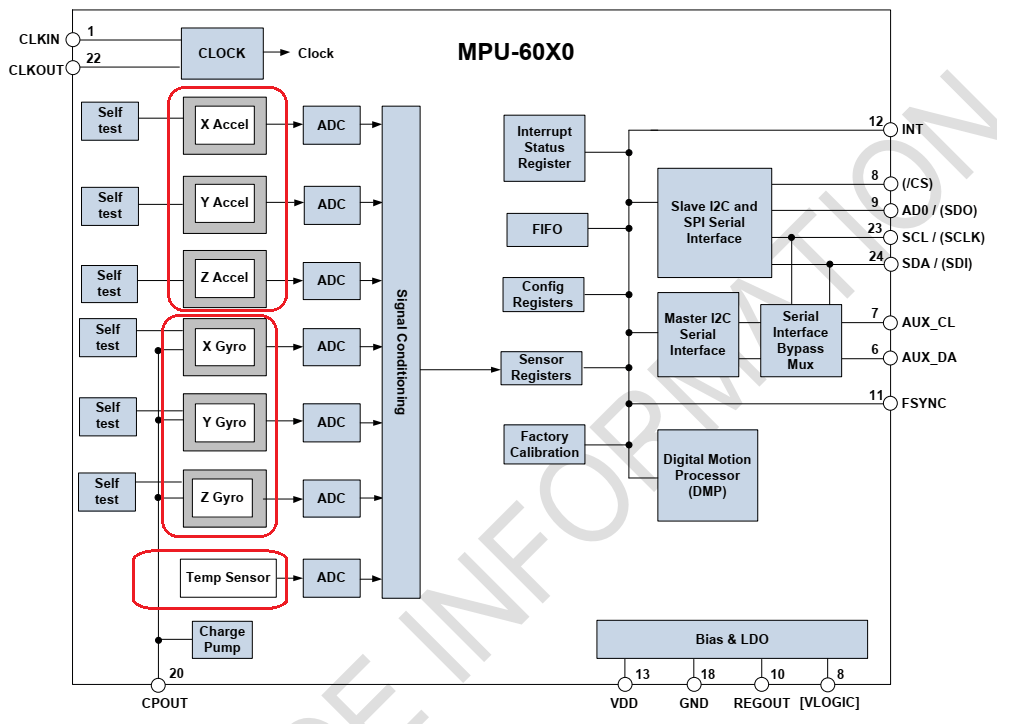
Schéma bloc du circuit MPU-60×0
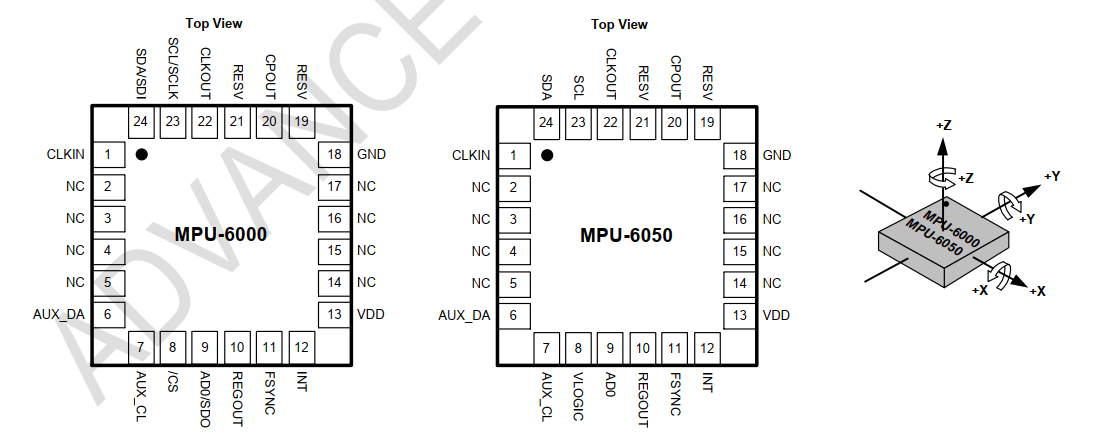
Package du circuit MPU-60×0
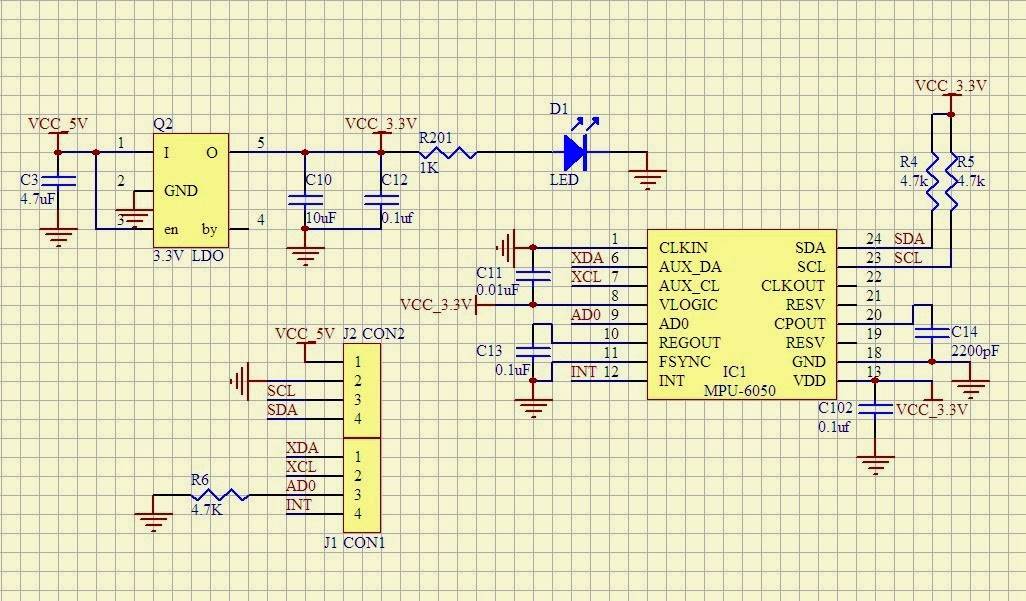
Schéma électronique de la carte GY-521
Caractéristiques du gyroscope
Le gyroscope MEMS à trois axes du MPU-60X0 comprend un large éventail de fonctionnalités:
Capteurs de vitesse angulaire (gyroscopes) à sortie numérique des axes X, Y et Z avec une plage pleine échelle programmable par l’utilisateur de ± 250, ± 500, ± 1000 et ± 2000 ° / s
Le signal de synchronisation externe connecté à la broche FSYNC prend en charge la synchronisation d’image, vidéo et GPS
Les ADC 16 bits intégrés permettent l’échantillonnage simultané des gyroscopes
Compensation de la stabilité en température intégrée dans le capteur
Amélioration des performances de bruit basse fréquence
Filtre passe-bas programmable numériquement
Courant de fonctionnement du gyroscope: 3,6 mA
Faible consommation au repos 5µA
Facteur d’échelle de sensibilité calibré en usine
Auto-test de l’utilisateur
Caractéristiques de l’accéléromètre
L’accéléromètre MEMS à trois axes du MPU-60X0 comprend un large éventail de fonctionnalités:
Accéléromètre à trois axes à sortie numérique avec une plage de pleine échelle programmable de ± 2g, ± 4g, ± 8g et
± 16g
Les ADC 16 bits intégrés permettent l’échantillonnage simultané des accéléromètres sans multiplexeur
Courant de fonctionnement normal de l’accéléromètre: 500µA
Courant du mode accéléromètre basse puissance: 10µA à 1,25Hz, 20µA à 5Hz, 60µA à 20Hz, 110µA à 40 Hz
Détection et signalisation d’orientation
Détection de robinet
Interruptions programmables par l’utilisateur
Interruption High-G
Auto-test de l’utilisateur
Applications
Stabilisateur vidéo / image
Contrôle / navigation des applications de l’interface utilisateur sans contact
Technologie MotionCommand (pour les raccourcis gestuels)
Contrôle par le mouvement le mouvement (drone, télécommande magic, console de jeu, etc.)
Reconnaissance gestuelle
Services basés sur la localisation
Stabilisateur des drones et robots
Combiné et jeux portables
Contrôleurs de jeu basés sur le mouvement
Télécommandes 3D pour DTV et décodeurs connectés à Internet, souris 3D
Capteurs portables pour la santé, le fitness et le sport
Jouets
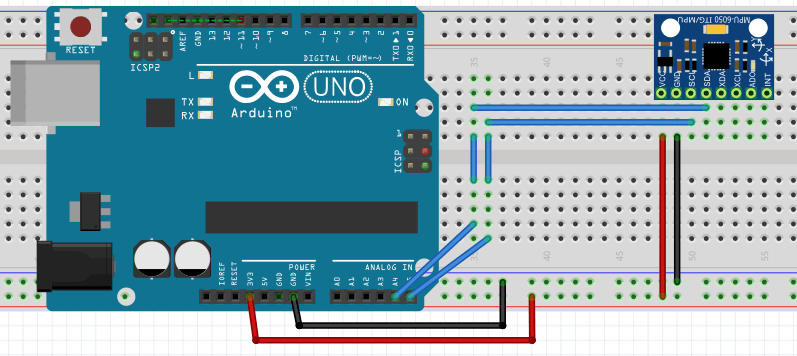
Montage avec Aduino
// Pinout /* VCC -> 3.3 V / 5 V (péférable) GND -> GND SCL -> A5 SDA -> A4
// Affichage dans le port série Roll/Pitch/ Yaw en ° /*Serial.print(PitchRoll[0]); Serial.print(","); Serial.print(PitchRoll[1]); Serial.print(","); Serial.println(PitchRoll[2]); //Serial.print(";"); delay(100);*/
// Affichage des 3 Axes de l'Accéléromètre Serial.print(GyAccTemp[0]); Serial.print(","); Serial.print(GyAccTemp[1]); Serial.print(","); Serial.println(GyAccTemp[2]);
// Lecture des données des capteurs void ReadGY521( int *GyAccTempp, int *GATCorrr) { // Init du module GY-521 Wire.beginTransmission(MPU); Wire.write(0x3B); Wire.endTransmission(false); Wire.requestFrom(MPU,14,true);
//Conversion des données accéléromètre en pitch/roll/yaw void ComputeAngle(int *GyAccTempp, double *PitchRol) { double x = GyAccTempp[0]; double y = GyAccTempp[1]; double z = GyAccTempp[2];
2 réponses sur « Drone | Arduino #6: Comment ça marche le capteur MPU-6050 GY-521 (Accéléromètre + Gyro) ? »
Bonjour, non initié en électronique je souhaiterai un boîtier de commande équipé du capteur mpu 6050 ou autre pour programmer le déplacement d’un panneau solaire motorisé fai maison.
Merci du coup de main
Jm
Bonjour, merci pour votre commentaire. Le capteur est sensible aux vibrations, je vous recommande un capteur type potentiomètre
facile d’utilisation (tension proportionnelle à l’angle de rotation du curseur).
2 réponses sur « Drone | Arduino #6: Comment ça marche le capteur MPU-6050 GY-521 (Accéléromètre + Gyro) ? »
Bonjour, non initié en électronique je souhaiterai un boîtier de commande équipé du capteur mpu 6050 ou autre pour programmer le déplacement d’un panneau solaire motorisé fai maison.
Merci du coup de main
Jm
Bonjour, merci pour votre commentaire. Le capteur est sensible aux vibrations, je vous recommande un capteur type potentiomètre
facile d’utilisation (tension proportionnelle à l’angle de rotation du curseur).