Objectifs du projet électronique
- Comprendre le principe de fonctionnement d’un moteur pas à pas
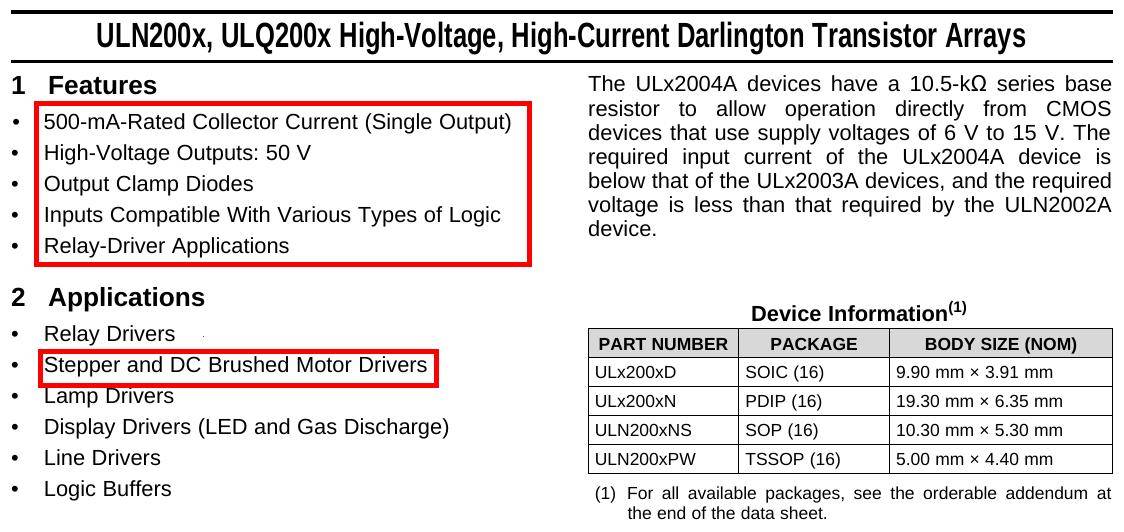
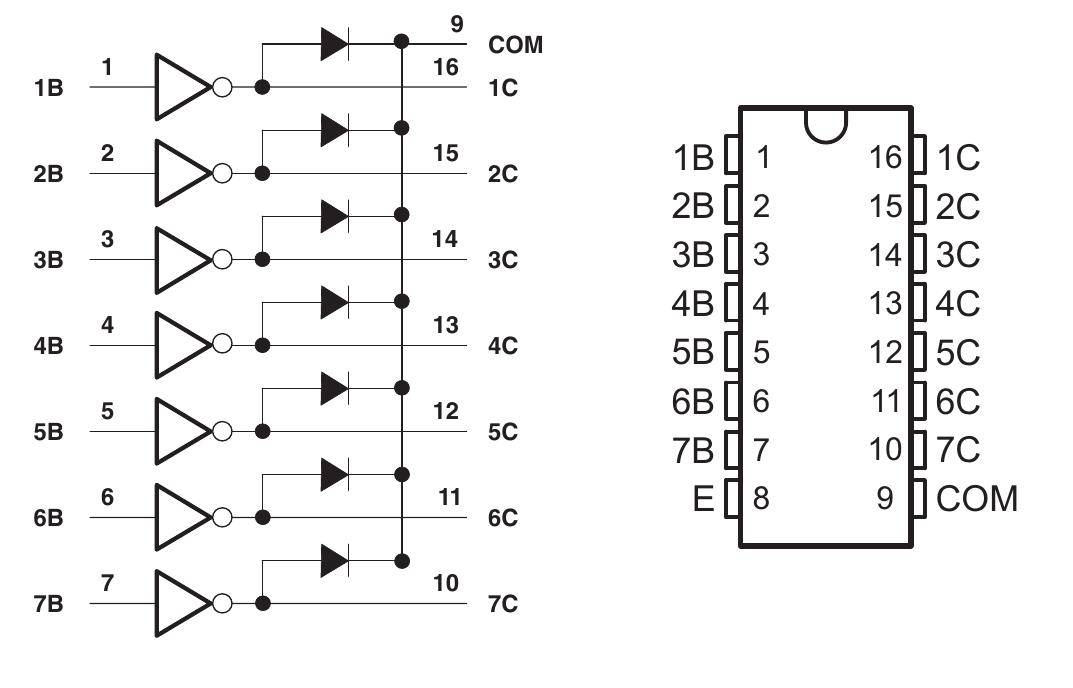
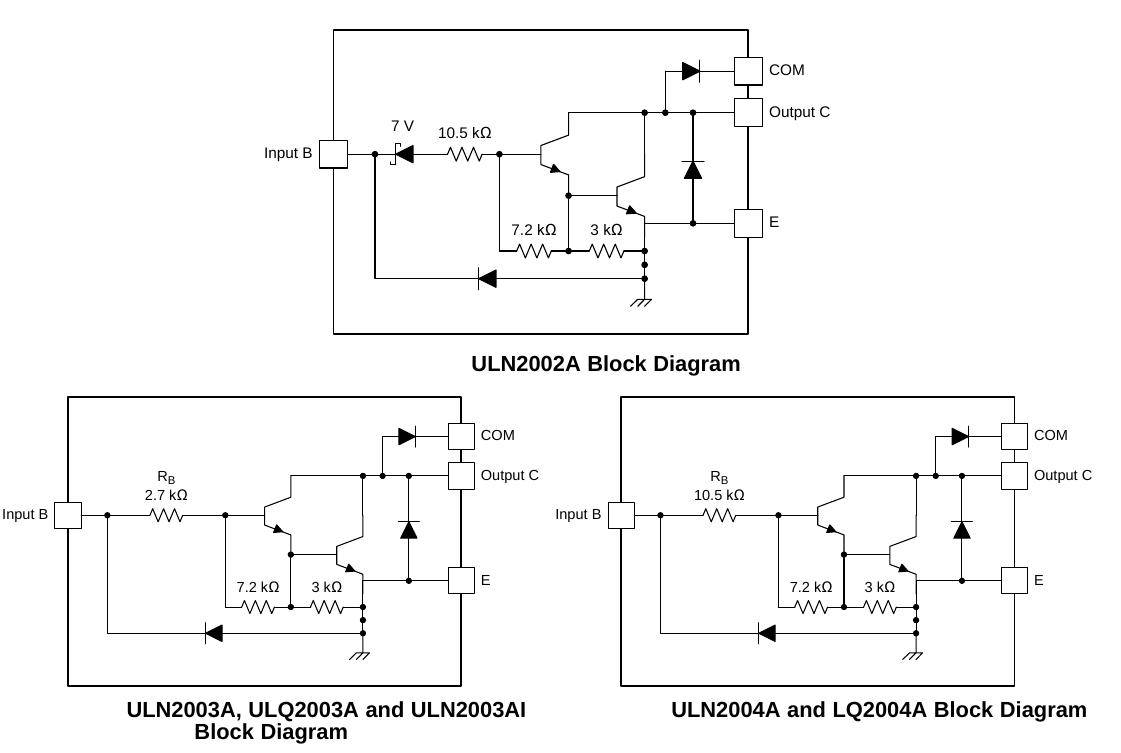
- Comprendre le fonctionnement du circuit ULN2003
- Savoir implémenter la commande d’un moteur pas à pas avec le microcontrôleur
- Savoir modifié le sens et la vitesse d’un moteur pas à pas
- Autres astuces de programmation
Principe de fonctionnement
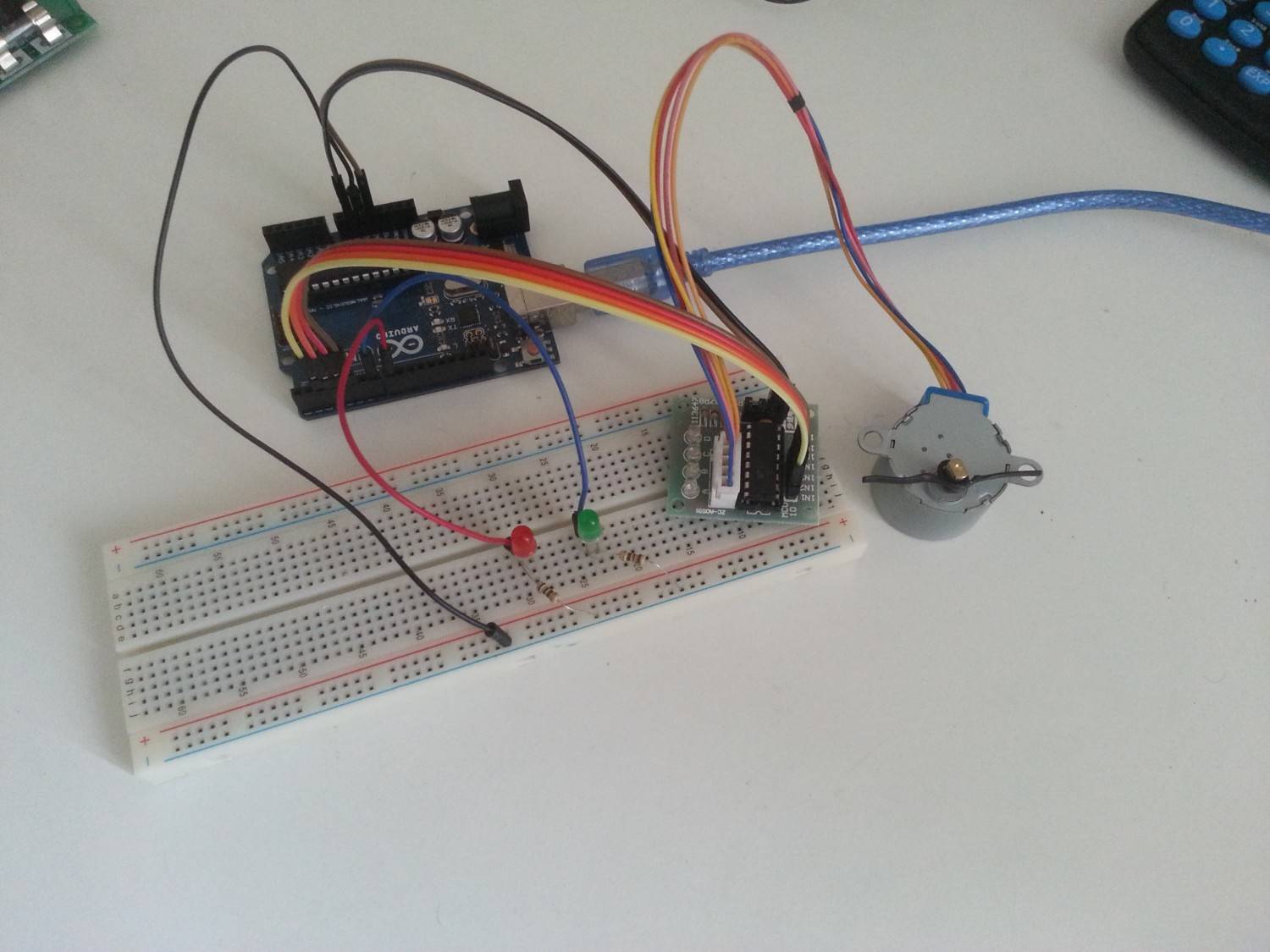
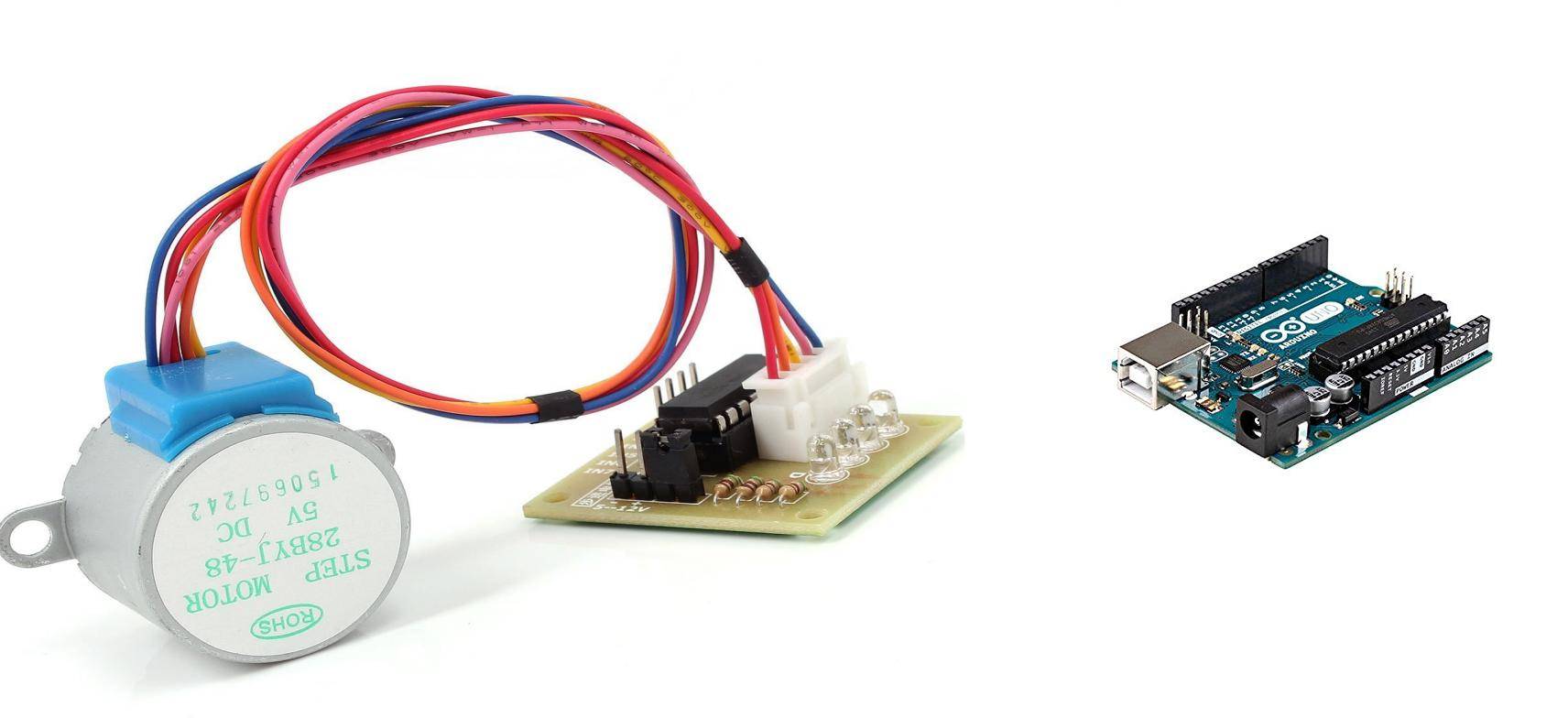
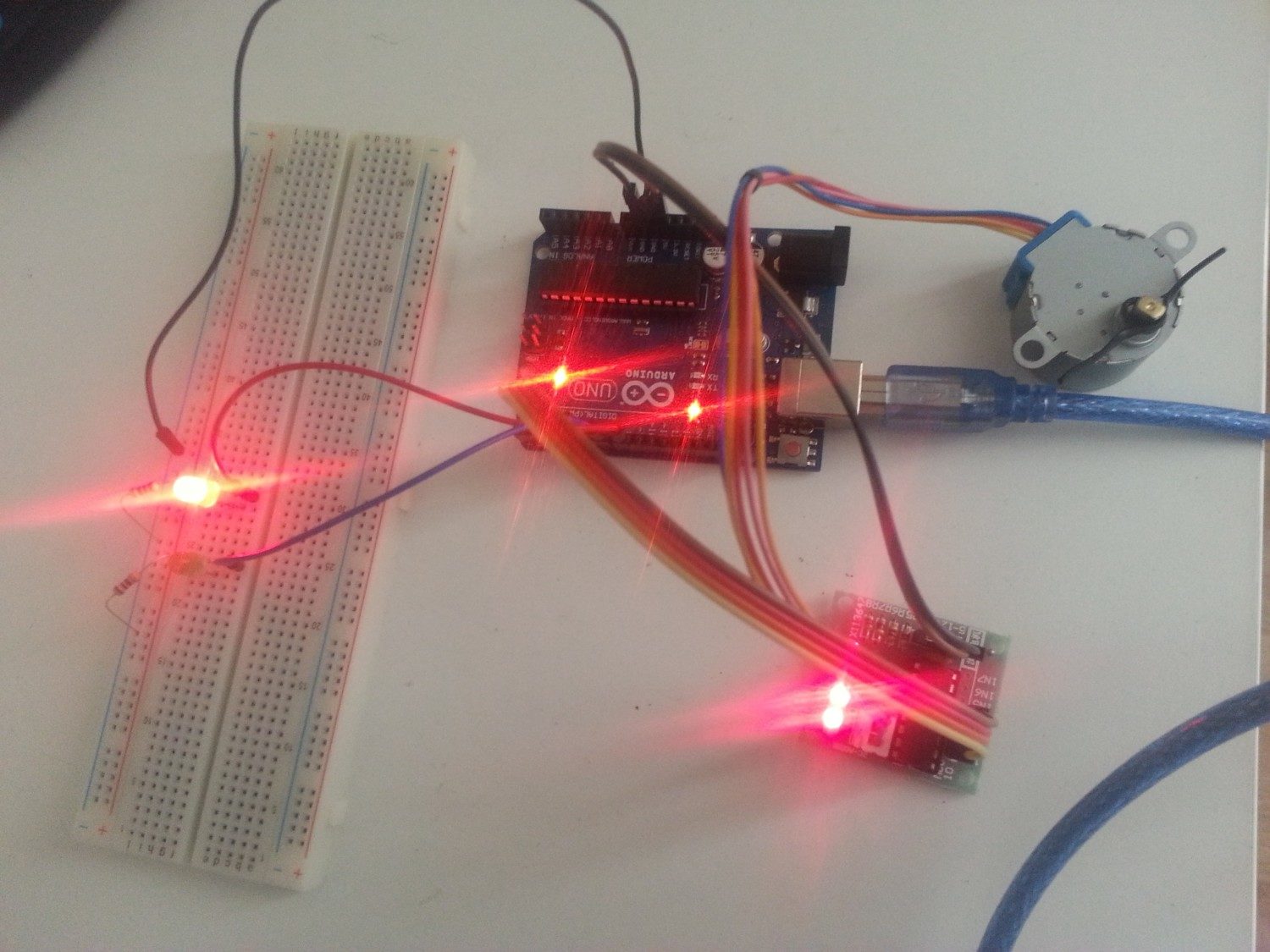
Le projet consiste à la commande d’un moteur pas à pas 4 phases en mode demi-pas en utilisant le driver ULN2003 pour booster le courant dans les phases du moteur. La carte Arduino sert à générer les signaux de commande du moteur pas à pas (8 commandes / tour) cadencés par une fréquence.
Les chronogrammes ci-dessous illustrent les signaux de la commande en mode demi-pas, le changement du sens est simple ! Il suffit d’inverser la séquences des commandes [1 9 8 12 4 6 2 3 ] au lieu de [1 3 2 6 4 12 8 9].
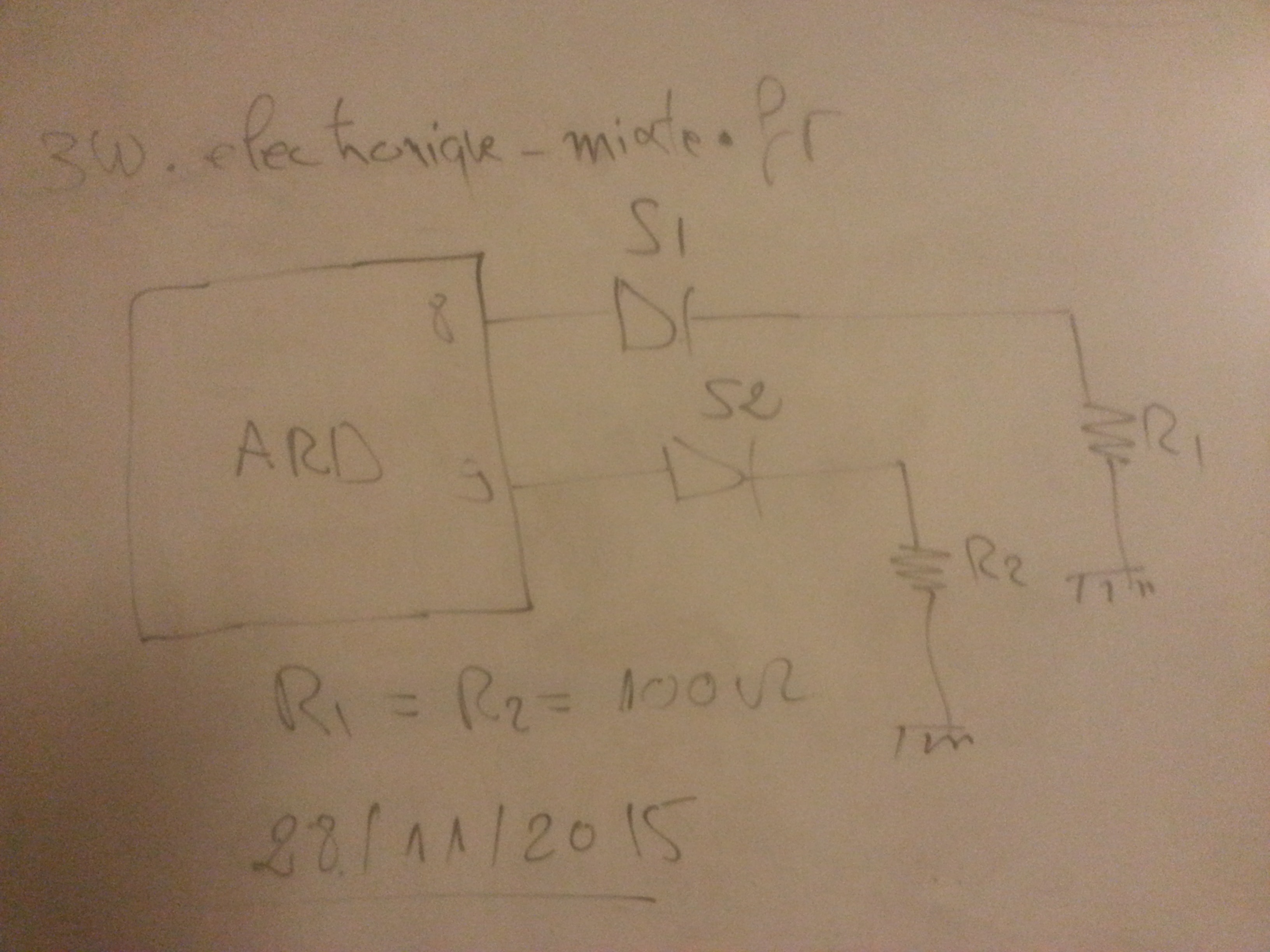
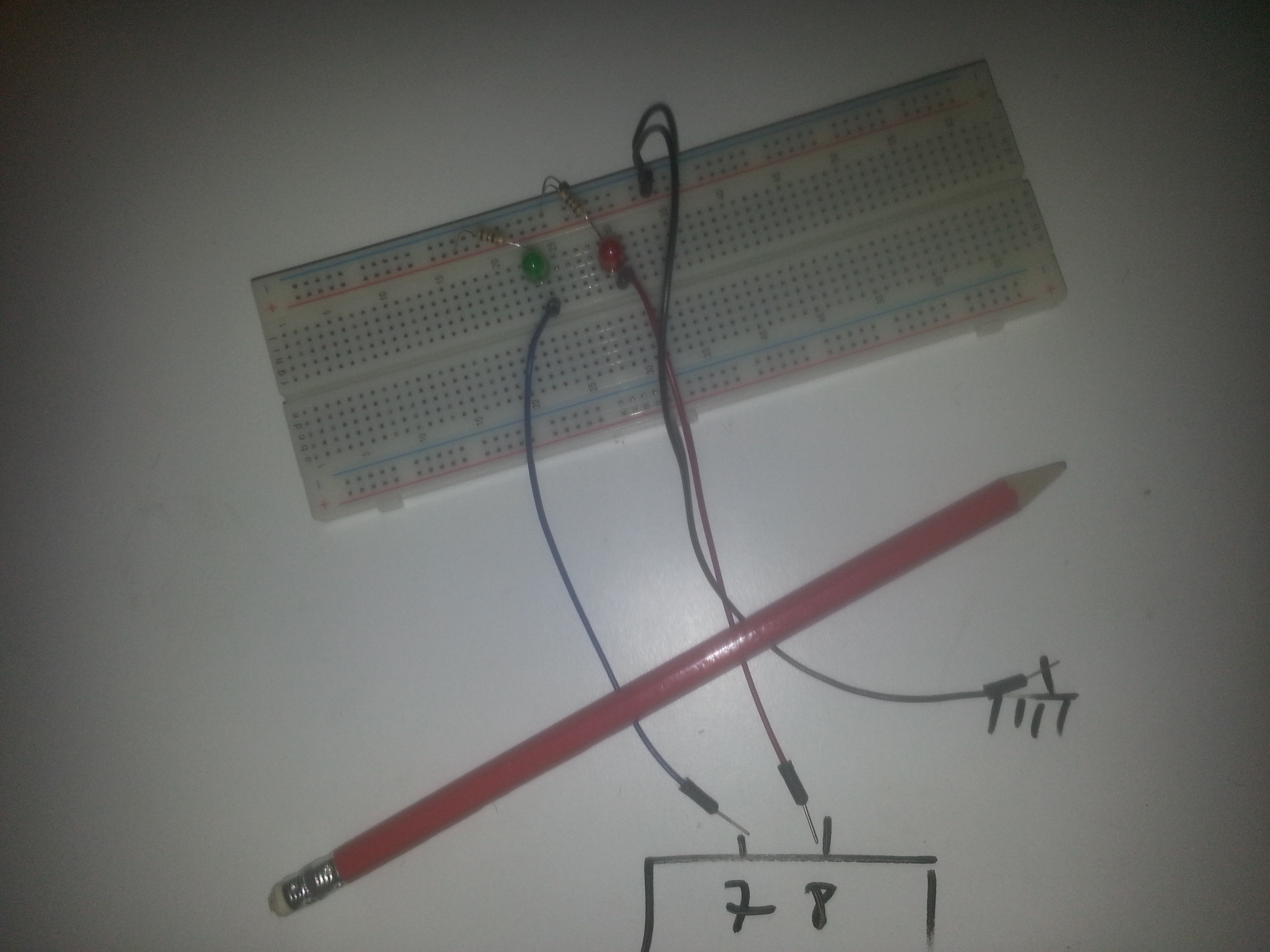
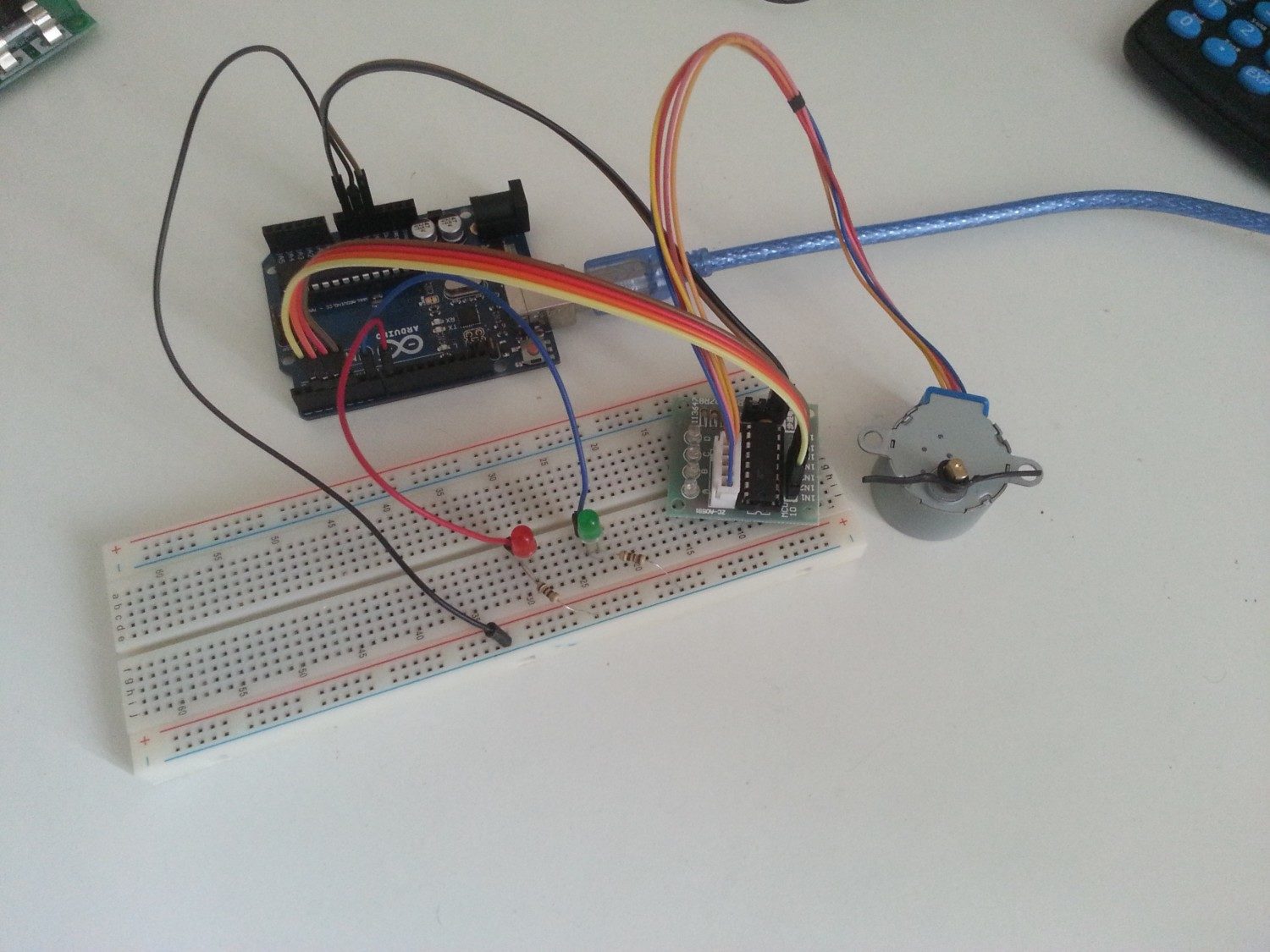
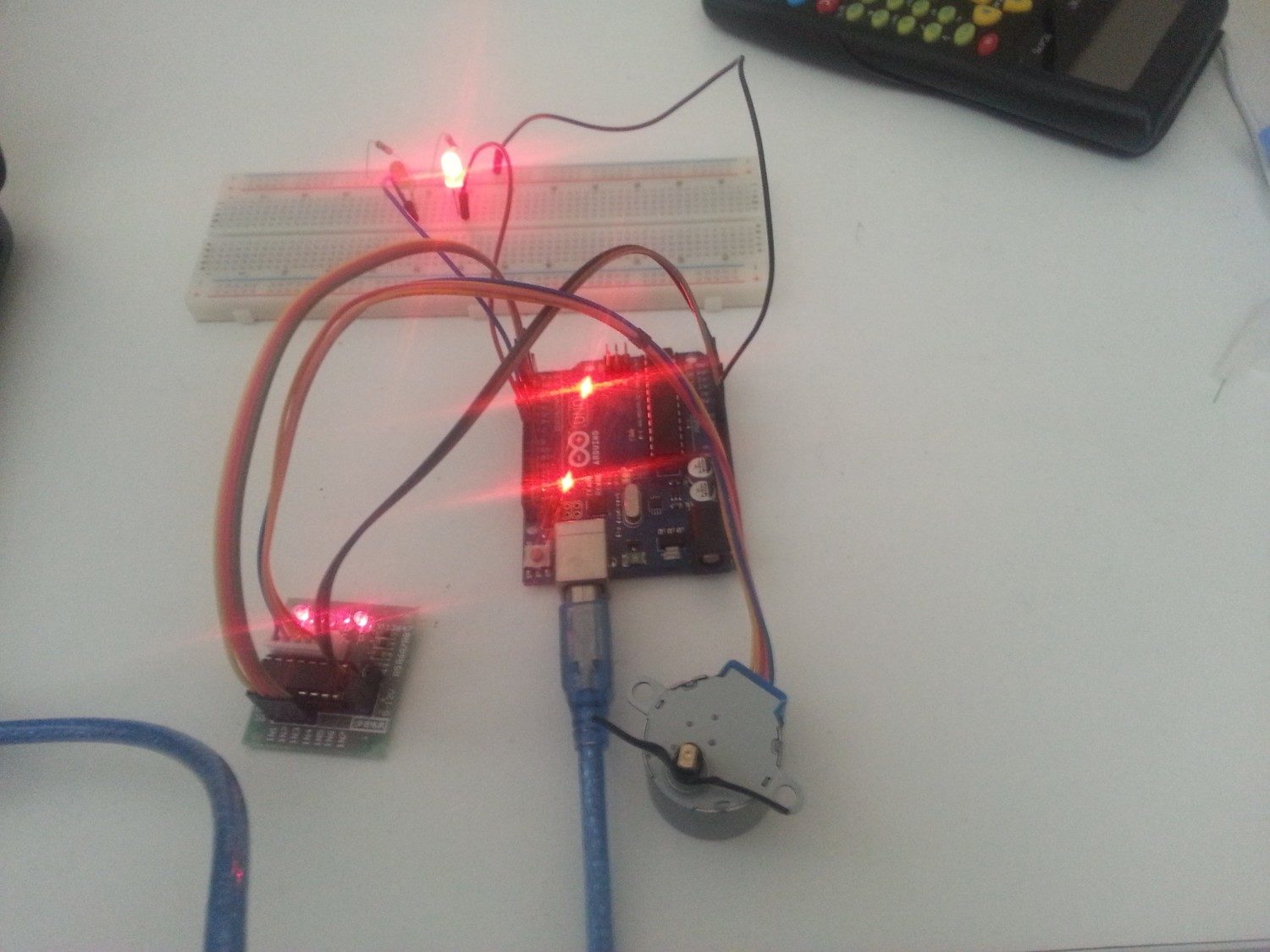
Le circuit contient deux Led pour indiquer le sens de rotation du moteur S1 et S2 pour le sens 1 et sens 2 de rotation. Les Led sont connectés aux pin 8 et 9 de l’Arduino.
Vous pouvez changer la vitesse de rotation du moteur en changeant le fréquence (Fre= 1/DelayMs, voir le programme). D’après le datasheet la fréquence maximale est limitée à 1000 Hz.
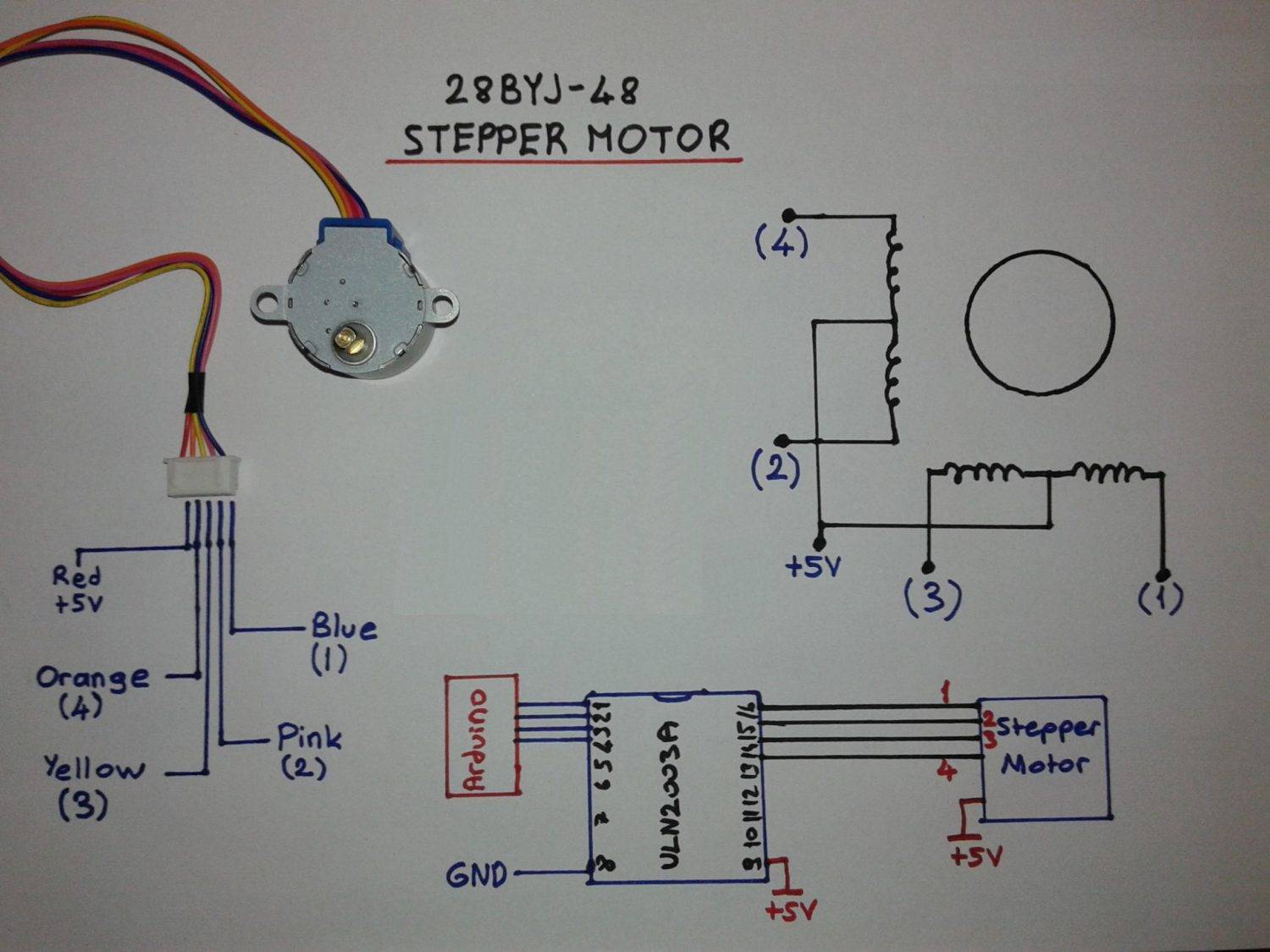
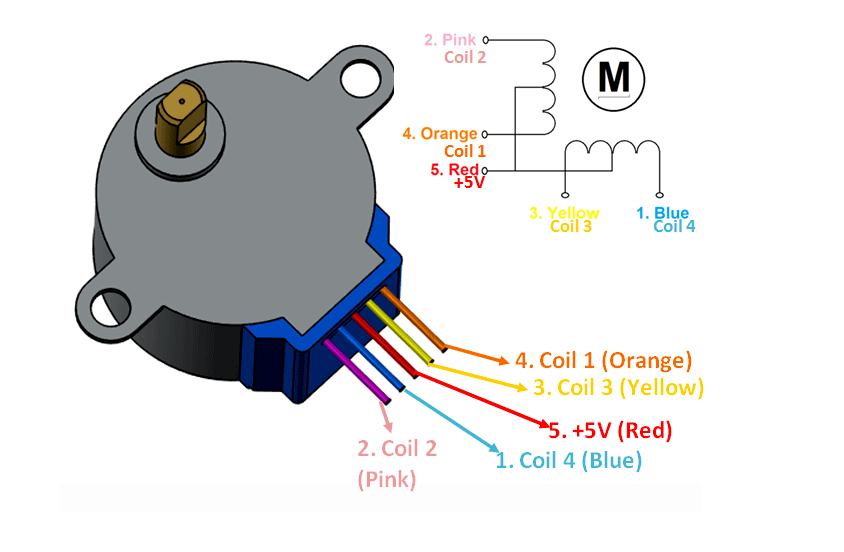
Moteur pas à pas 28BYJ-48 – 5V (Datasheet)
Notions sur la commande de moteur pas à pas unipolaire
Ce type de moteur se trouve dans un grand nombre de périphériques informatiques : imprimantes, lecteur de disquettes ou disque dur car il s’agit du composant mécanique par excellence pour tout ce qui demande une grande précision de positionnement. Il en existe plusieurs modèles dont le nombre de pas par tours peut varier de quelques dizaines à quelques centaines. C’est la raison pour laquelle nous avons choisi d’utiliser ce type de moteur pour réaliser le positionnement de la caméra vidéo, aussi bien horizontalement que verticalement. Lire la suite…
Fonctionnement du circuit ULN2003 (Datasheet)
Programme Arduino
Photos du projet
Cours PDF:
-
Les machines électriques Electricité 2 — Electrotechnique
-
Généralités sur les machines électriques tournantes
-
Machines électriques cours et problèmes
-
Les moteurs électriques pour mieux les piloter et les protéger
-
La machine à courant continu
-
Généralités sur les machines électriques
-
Les moteurs électriques
-
Machines tournantes – moteur asynchrone (MAS)
************
3 réponses sur « Projet électronique : Commande d’un moteur pas à pas 4 phases avec Arduino »
Super ce cours, Merci
Vos Vidéos nous aide beaucoup
Et c’est expliqué aussi
Merci !
Avec plaisir Eli!